Altivar® 58 TRX AC Drives
Type FVC Adjustment Parameters
Speed Loop Modes
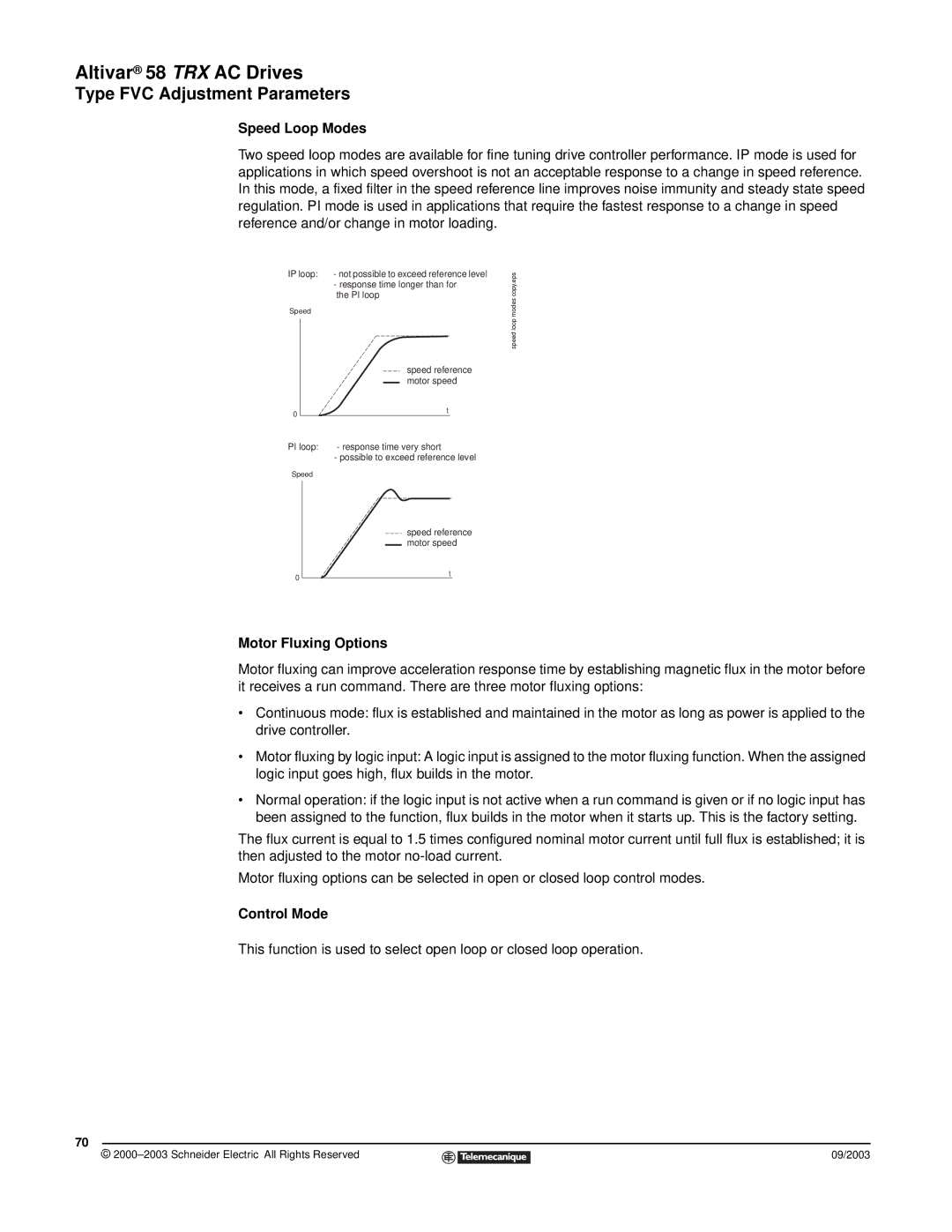
Two speed loop modes are available for fine tuning drive controller performance. IP mode is used for applications in which speed overshoot is not an acceptable response to a change in speed reference. In this mode, a fixed filter in the speed reference line improves noise immunity and steady state speed regulation. PI mode is used in applications that require the fastest response to a change in speed reference and/or change in motor loading.
IP loop: | - not possible to exceed reference level |
-response time longer than for the PI loop
Speed |
|
| speed reference |
| motor speed |
0 | t |
|
speed loop modes copy.eps
PI loop: | - response time very short |
| - possible to exceed reference level |
Speed |
|
| speed reference |
| motor speed |
0 | t |
|
Motor Fluxing Options
Motor fluxing can improve acceleration response time by establishing magnetic flux in the motor before it receives a run command. There are three motor fluxing options:
•Continuous mode: flux is established and maintained in the motor as long as power is applied to the drive controller.
•Motor fluxing by logic input: A logic input is assigned to the motor fluxing function. When the assigned logic input goes high, flux builds in the motor.
•Normal operation: if the logic input is not active when a run command is given or if no logic input has been assigned to the function, flux builds in the motor when it starts up. This is the factory setting.
The flux current is equal to 1.5 times configured nominal motor current until full flux is established; it is then adjusted to the motor
Motor fluxing options can be selected in open or closed loop control modes.
Control Mode
This function is used to select open loop or closed loop operation.
70
© |
| 09/2003 |
| ||
|
|
|