Altivar® 58 TRX AC Drives
Assignment of Analog Inputs (AIx)
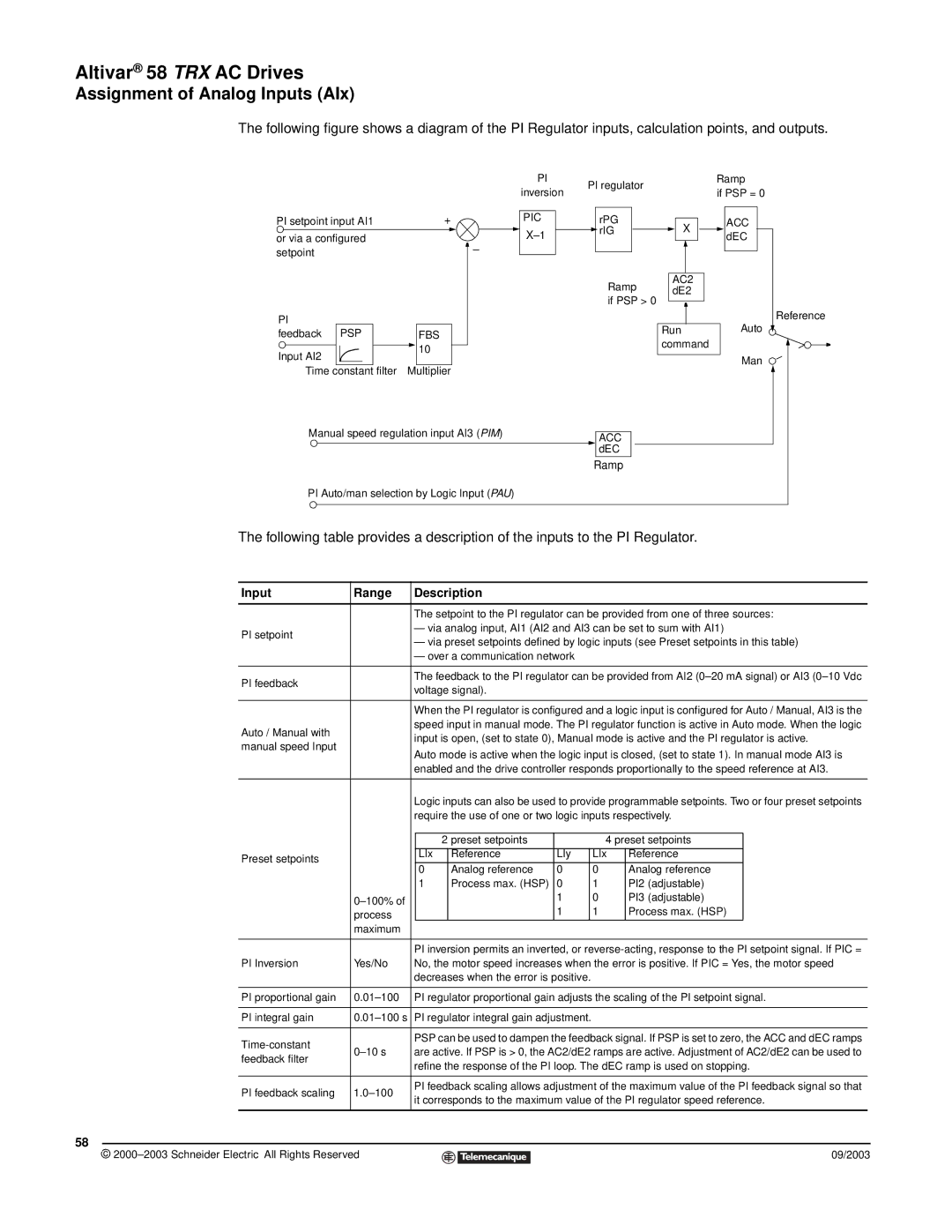
The following figure shows a diagram of the PI Regulator inputs, calculation points, and outputs.
PI setpoint input AI1 | + |
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
or via a configured |
|
|
|
|
|
| – | |||||
setpoint |
|
|
|
|
|
| ||||||
|
|
|
|
|
| |||||||
PI |
|
|
|
|
|
|
| |||||
feedback |
| PSP |
|
|
| FBS |
|
| ||||
|
|
|
|
|
|
|
| 10 |
|
|
|
|
Input AI2 |
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| ||
| Time |
|
|
| filter |
|
|
| ||||
| constant | Multiplier | ||||||||||
Manual speed regulation input AI3 (PIM)
PI | PI regulator |
|
|
|
|
|
| Ramp | ||||||||||
inversion |
|
|
|
|
|
| if PSP = 0 | |||||||||||
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PIC |
|
|
| rPG |
|
|
| X |
|
|
|
| ACC |
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
| rIG |
|
|
|
|
|
|
|
|
|
| ||||
X±1 |
|
|
|
|
|
|
|
|
| dEC |
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
| Ramp |
| AC2 |
|
|
|
|
|
|
|
| ||||
|
|
|
|
| dE2 |
|
|
|
|
|
|
|
| |||||
|
|
|
| if PSP > 0 |
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Reference | |||
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
| Run |
|
|
|
|
|
| Auto |
| ||||
|
|
|
|
|
| command |
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
| Man | ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
ACC dEC
Ramp
PI Auto/man selection by Logic Input (PAU)
The following table provides a description of the inputs to the PI Regulator.
|
| Input | Range | Description |
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
| The setpoint to the PI regulator can be provided from one of three sources: | |||||||||||
|
| PI setpoint |
| — via analog input, AI1 (AI2 and AI3 can be set to sum with AI1) | |||||||||||
|
|
| — via preset setpoints defined by logic inputs (see Preset setpoints in this table) | ||||||||||||
|
|
|
| ||||||||||||
|
|
|
| — over a communication network |
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
| PI feedback |
| The feedback to the PI regulator can be provided from AI2 | |||||||||||
|
|
| voltage signal). |
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
| When the PI regulator is configured and a logic input is configured for Auto / Manual, AI3 is the | |||||||||||
|
| Auto / Manual with |
| speed input in manual mode. The PI regulator function is active in Auto mode. When the logic | |||||||||||
|
|
| input is open, (set to state 0), Manual mode is active and the PI regulator is active. | ||||||||||||
|
| manual speed Input |
| ||||||||||||
|
|
| Auto mode is active when the logic input is closed, (set to state 1). In manual mode AI3 is | ||||||||||||
|
|
|
| ||||||||||||
|
|
|
| enabled and the drive controller responds proportionally to the speed reference at AI3. | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
| Logic inputs can also be used to provide programmable setpoints. Two or four preset setpoints | |||||||||||
|
|
|
| require the use of one or two logic inputs respectively. | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
| 2 preset setpoints |
|
| 4 preset setpoints |
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
| Preset setpoints |
|
| LIx |
| Reference | LIy |
| LIx | Reference |
|
| ||
|
|
|
|
| 0 |
| Analog reference | 0 |
| 0 | Analog reference |
|
| ||
|
|
|
|
| 1 |
| Process max. (HSP) | 0 |
| 1 | PI2 (adjustable) |
| |||
|
|
|
|
|
|
|
|
| 1 |
| 0 | PI3 (adjustable) |
| ||
|
|
|
|
|
|
|
|
| 1 |
| 1 | Process max. (HSP) |
|
| |
|
|
| process |
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
| maximum |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
| PI inversion permits an inverted, or | |||||||||||
|
| PI Inversion | Yes/No | No, the motor speed increases when the error is positive. If PIC = Yes, the motor speed | |||||||||||
|
|
|
| decreases when the error is positive. |
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
| PI proportional gain | PI regulator proportional gain adjusts the scaling of the PI setpoint signal. | ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
| PI integral gain | PI regulator integral gain adjustment. |
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
| PSP can be used to dampen the feedback signal. If PSP is set to zero, the ACC and dEC ramps | ||||||||||||
|
|
| are active. If PSP is > 0, the AC2/dE2 ramps are active. Adjustment of AC2/dE2 can be used to | ||||||||||||
|
| feedback filter | |||||||||||||
|
|
| refine the response of the PI loop. The dEC ramp is used on stopping. | ||||||||||||
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
| PI feedback scaling |
| PI feedback scaling allows adjustment of the maximum value of the PI feedback signal so that | |||||||||||
|
| it corresponds to the maximum value of the PI regulator speed reference. | |||||||||||||
|
|
|
| ||||||||||||
58 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
© |
|
|
|
|
|
|
|
|
| 09/2003 | |||||
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|