f(Hz) |
| TorqRed.eps |
|
| |
HSP |
|
|
Acc 2 | Dec 2 |
|
Acc 1 | Dec 1 |
|
| t |
|
Altivar® 58 TRX AC Drives
Assignment of Logic Inputs (LIx)
ASSIGNMENT OF LOGIC INPUTS (LIx)
The following sections describe the possible assignments of the Logic Inputs (LIx) on the drive controller and the optional I/O Extension Cards. Logic Input 1 (LI1) is configured for Run Forward when the drive controller is set for two wire control and configured for STOP when the drive controller is set for three wire control. In three wire control, Run Forward requires a logic input. Run Reverse, if used, requires another logic input.
Forward 1
or
Reverse 0
1
LI4
t
Reverse Operation
A logic input is assigned to reverse the direction of operation. The factory default is for logic input LI2 to be used to reverse operation. To disable this function (for example, when using the controller with a
0
t
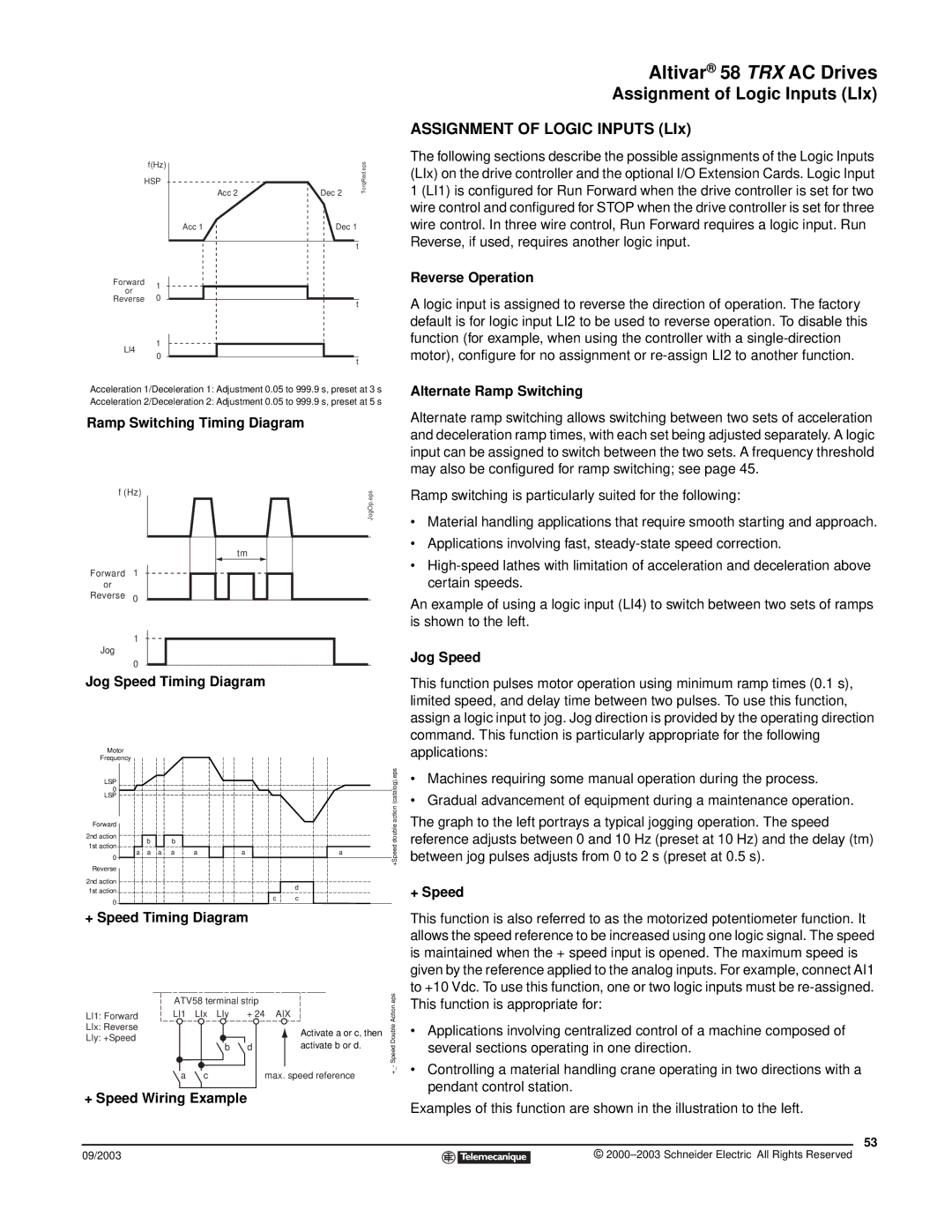
Acceleration 1/Deceleration 1: Adjustment 0.05 to 999.9 s, preset at 3 s
Acceleration 2/Deceleration 2: Adjustment 0.05 to 999.9 s, preset at 5 s
Ramp Switching Timing Diagram
motor), configure for no assignment or
Alternate Ramp Switching
Alternate ramp switching allows switching between two sets of acceleration and deceleration ramp times, with each set being adjusted separately. A logic input can be assigned to switch between the two sets. A frequency threshold may also be configured for ramp switching; see page 45.
f (Hz)
Forward 1
or
Reverse 0
1
Jog
0
JogOp.eps
tm
Ramp switching is particularly suited for the following:
•Material handling applications that require smooth starting and approach.
•Applications involving fast,
•
An example of using a logic input (LI4) to switch between two sets of ramps is shown to the left.
Jog Speed
Jog Speed Timing Diagram
Motor |
|
|
|
|
|
Frequency |
|
|
|
|
|
LSP |
|
|
|
|
|
0 |
|
|
|
|
|
LSP |
|
|
|
|
|
Forward |
|
|
|
|
|
2nd action | b |
|
|
|
|
b |
|
|
|
| |
1st action |
|
|
|
|
|
a a a | a | a | a |
| a |
0 |
|
|
|
|
|
Reverse |
|
|
|
|
|
2nd action |
|
|
|
| d |
1st action |
|
|
|
| |
|
|
| c | c | |
0 |
|
|
| ||
|
|
|
|
| |
+ Speed Timing Diagram |
|
| |||
| ATV58 terminal strip |
|
| ||
LI1: Forward | LI1 | LIx LIy | + 24 | AIX |
|
LIx: Reverse |
|
|
|
| Activate a or c, then |
LIy: +Speed |
|
|
|
| |
| b | d |
| activate b or d. | |
|
|
| |||
| a | c | max. speed reference | ||
+ Speed Wiring Example
09/2003
+Speed double action (catalog).eps
+_- Speed Double Action.eps
This function pulses motor operation using minimum ramp times (0.1 s), limited speed, and delay time between two pulses. To use this function, assign a logic input to jog. Jog direction is provided by the operating direction command. This function is particularly appropriate for the following applications:
•Machines requiring some manual operation during the process.
•Gradual advancement of equipment during a maintenance operation.
The graph to the left portrays a typical jogging operation. The speed reference adjusts between 0 and 10 Hz (preset at 10 Hz) and the delay (tm) between jog pulses adjusts from 0 to 2 s (preset at 0.5 s).
+ Speed
This function is also referred to as the motorized potentiometer function. It allows the speed reference to be increased using one logic signal. The speed is maintained when the + speed input is opened. The maximum speed is given by the reference applied to the analog inputs. For example, connect AI1 to +10 Vdc. To use this function, one or two logic inputs must be
•Applications involving centralized control of a machine composed of several sections operating in one direction.
•Controlling a material handling crane operating in two directions with a pendant control station.
Examples of this function are shown in the illustration to the left.
53
©