Altivar® 58 TRX AC Drives
Communication Parameters
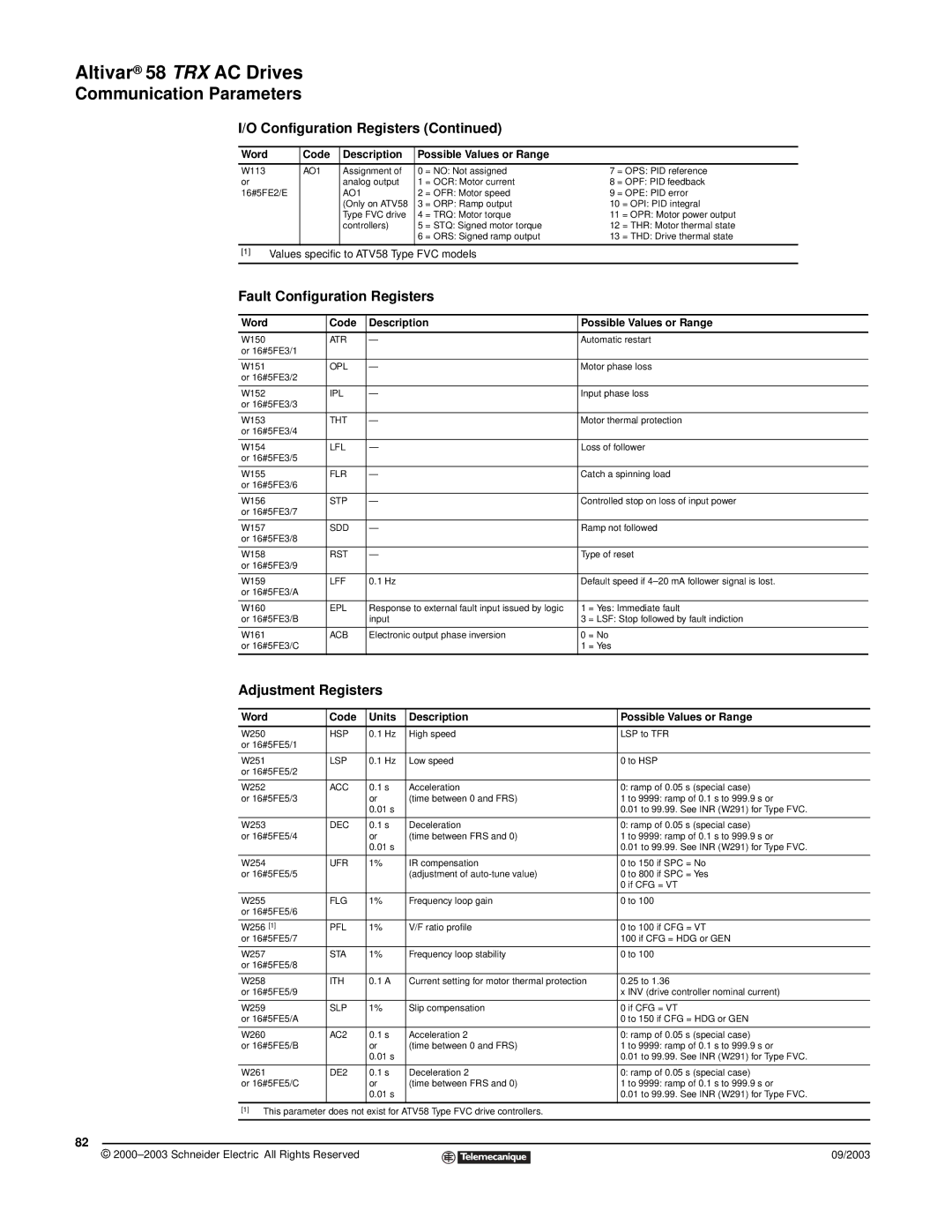
I/O Configuration Registers (Continued)
Word | Code | Description | Possible Values or Range |
|
|
| |
|
|
|
|
|
|
| |
W113 | AO1 | Assignment of | 0 | = NO: Not assigned | 7 | = OPS: PID reference | |
or |
| analog output | 1 | = OCR: Motor current | 8 | = OPF: PID feedback | |
16#5FE2/E |
| AO1 | 2 | = OFR: Motor speed | 9 | = OPE: PID error | |
|
| (Only on ATV58 | 3 | = ORP: Ramp output | 10 | = OPI: PID integral | |
|
| Type FVC drive | 4 | = TRQ: Motor torque | 11 | = OPR: Motor power output | |
|
| controllers) | 5 | = STQ: Signed motor torque | 12 | = THR: Motor thermal state | |
|
|
| 6 | = ORS: Signed ramp output | 13 | = THD: Drive thermal state | |
|
|
|
|
|
|
|
|
[1] Values specific to ATV58 Type FVC models
Fault Configuration Registers
Word | Code | Description | Possible Values or Range |
|
|
|
|
W150 | ATR | — | Automatic restart |
or 16#5FE3/1 |
|
|
|
|
|
|
|
W151 | OPL | — | Motor phase loss |
or 16#5FE3/2 |
|
|
|
|
|
|
|
W152 | IPL | — | Input phase loss |
or 16#5FE3/3 |
|
|
|
|
|
|
|
W153 | THT | — | Motor thermal protection |
or 16#5FE3/4 |
|
|
|
|
|
|
|
W154 | LFL | — | Loss of follower |
or 16#5FE3/5 |
|
|
|
|
|
|
|
W155 | FLR | — | Catch a spinning load |
or 16#5FE3/6 |
|
|
|
|
|
|
|
W156 | STP | — | Controlled stop on loss of input power |
or 16#5FE3/7 |
|
|
|
|
|
|
|
W157 | SDD | — | Ramp not followed |
or 16#5FE3/8 |
|
|
|
|
|
|
|
W158 | RST | — | Type of reset |
or 16#5FE3/9 |
|
|
|
|
|
|
|
W159 | LFF | 0.1 Hz | Default speed if |
or 16#5FE3/A |
|
|
|
|
|
|
|
W160 | EPL | Response to external fault input issued by logic | 1 = Yes: Immediate fault |
or 16#5FE3/B |
| input | 3 = LSF: Stop followed by fault indiction |
|
|
|
|
W161 | ACB | Electronic output phase inversion | 0 = No |
or 16#5FE3/C |
|
| 1 = Yes |
|
|
|
|
Adjustment Registers
Word | Code | Units | Description | Possible Values or Range |
|
|
|
|
|
W250 | HSP | 0.1 Hz | High speed | LSP to TFR |
or 16#5FE5/1 |
|
|
|
|
|
|
|
|
|
W251 | LSP | 0.1 Hz | Low speed | 0 to HSP |
or 16#5FE5/2 |
|
|
|
|
|
|
|
|
|
W252 | ACC | 0.1 s | Acceleration | 0: ramp of 0.05 s (special case) |
or 16#5FE5/3 |
| or | (time between 0 and FRS) | 1 to 9999: ramp of 0.1 s to 999.9 s or |
|
| 0.01 s |
| 0.01 to 99.99. See INR (W291) for Type FVC. |
|
|
|
|
|
W253 | DEC | 0.1 s | Deceleration | 0: ramp of 0.05 s (special case) |
or 16#5FE5/4 |
| or | (time between FRS and 0) | 1 to 9999: ramp of 0.1 s to 999.9 s or |
|
| 0.01 s |
| 0.01 to 99.99. See INR (W291) for Type FVC. |
|
|
|
|
|
W254 | UFR | 1% | IR compensation | 0 to 150 if SPC = No |
or 16#5FE5/5 |
|
| (adjustment of | 0 to 800 if SPC = Yes |
|
|
|
| 0 if CFG = VT |
|
|
|
|
|
W255 | FLG | 1% | Frequency loop gain | 0 to 100 |
or 16#5FE5/6 |
|
|
|
|
|
|
|
|
|
W256 [1] | PFL | 1% | V/F ratio profile | 0 to 100 if CFG = VT |
or 16#5FE5/7 |
|
|
| 100 if CFG = HDG or GEN |
|
|
|
|
|
W257 | STA | 1% | Frequency loop stability | 0 to 100 |
or 16#5FE5/8 |
|
|
|
|
|
|
|
|
|
W258 | ITH | 0.1 A | Current setting for motor thermal protection | 0.25 to 1.36 |
or 16#5FE5/9 |
|
|
| x INV (drive controller nominal current) |
|
|
|
|
|
W259 | SLP | 1% | Slip compensation | 0 if CFG = VT |
or 16#5FE5/A |
|
|
| 0 to 150 if CFG = HDG or GEN |
|
|
|
|
|
W260 | AC2 | 0.1 s | Acceleration 2 | 0: ramp of 0.05 s (special case) |
or 16#5FE5/B |
| or | (time between 0 and FRS) | 1 to 9999: ramp of 0.1 s to 999.9 s or |
|
| 0.01 s |
| 0.01 to 99.99. See INR (W291) for Type FVC. |
|
|
|
|
|
W261 | DE2 | 0.1 s | Deceleration 2 | 0: ramp of 0.05 s (special case) |
or 16#5FE5/C |
| or | (time between FRS and 0) | 1 to 9999: ramp of 0.1 s to 999.9 s or |
|
| 0.01 s |
| 0.01 to 99.99. See INR (W291) for Type FVC. |
|
|
|
|
|
[1] This parameter does not exist for ATV58 Type FVC drive controllers. |
| |||
82
© |
| 09/2003 |
| ||
|
|
|