Altivar® 58 TRX AC Drives
Speed Regulation (Constant Torque Rated Products)
SPEED REGULATION (CONSTANT TORQUE RATED PRODUCTS)
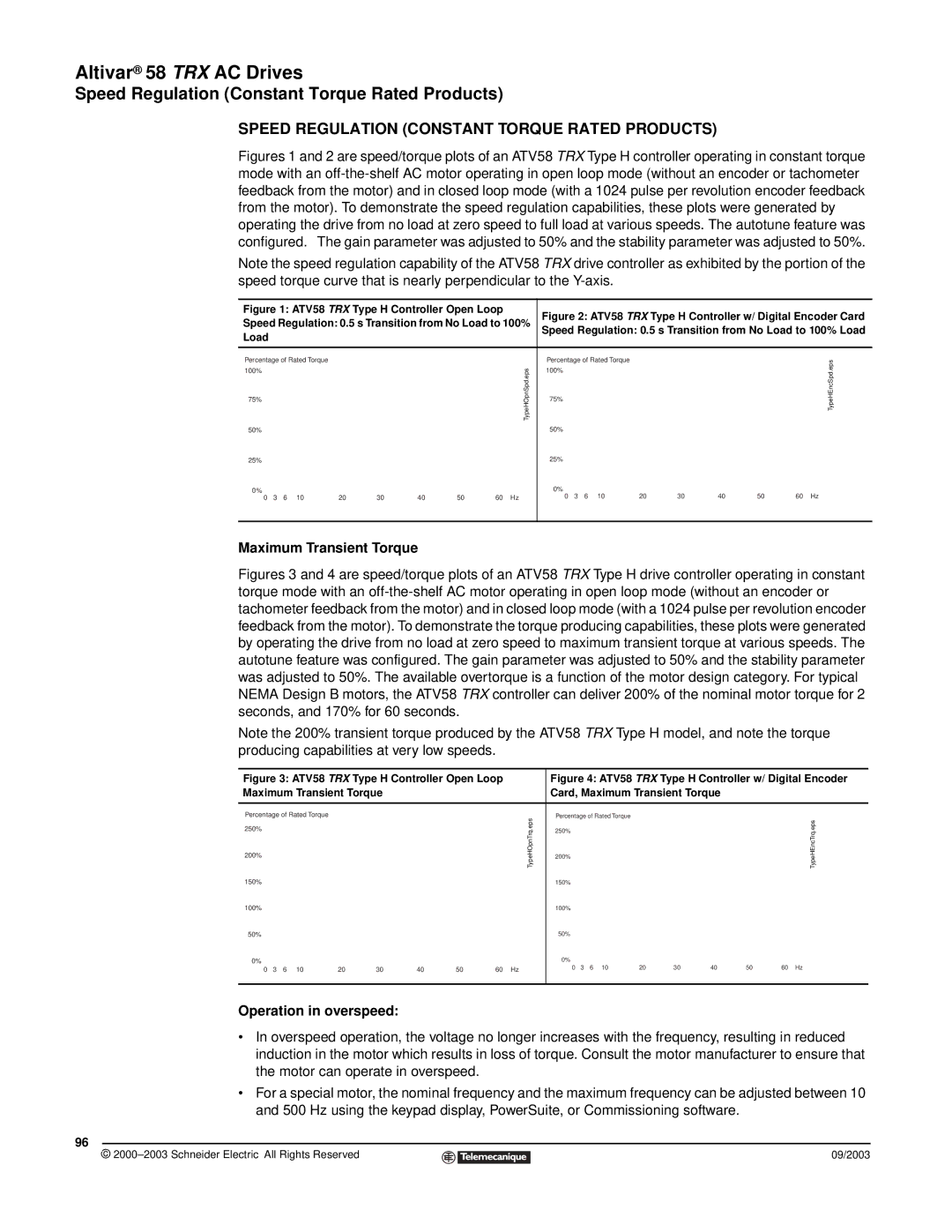
Figures 1 and 2 are speed/torque plots of an ATV58 TRX Type H controller operating in constant torque mode with an off-the-shelf AC motor operating in open loop mode (without an encoder or tachometer feedback from the motor) and in closed loop mode (with a 1024 pulse per revolution encoder feedback from the motor). To demonstrate the speed regulation capabilities, these plots were generated by operating the drive from no load at zero speed to full load at various speeds. The autotune feature was configured. The gain parameter was adjusted to 50% and the stability parameter was adjusted to 50%.
Note the speed regulation capability of the ATV58 TRX drive controller as exhibited by the portion of the speed torque curve that is nearly perpendicular to the
Figure 1: ATV58 TRX Type H Controller Open Loop
Speed Regulation: 0.5 s Transition from No Load to 100% Load
Percentage of Rated Torque |
|
|
|
|
|
| |||
100% |
|
|
|
|
|
|
|
| TypeHOpnSpd.eps |
75% |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| |
50% |
|
|
|
|
|
|
|
|
|
25% |
|
|
|
|
|
|
|
|
|
0% |
|
|
|
|
|
|
|
|
|
0 | 3 | 6 | 10 | 20 | 30 | 40 | 50 | 60 | Hz |
Figure 2: ATV58 TRX Type H Controller w/ Digital Encoder Card
Speed Regulation: 0.5 s Transition from No Load to 100% Load
Percentage of Rated Torque |
|
|
|
|
| TypeHEncSpd.eps | |||
100% |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| |
75% |
|
|
|
|
|
|
|
|
|
50% |
|
|
|
|
|
|
|
|
|
25% |
|
|
|
|
|
|
|
|
|
0% |
|
|
|
|
|
|
|
|
|
0 | 3 | 6 | 10 | 20 | 30 | 40 | 50 | 60 | Hz |
Maximum Transient Torque
Figures 3 and 4 are speed/torque plots of an ATV58 TRX Type H drive controller operating in constant torque mode with an off-the-shelf AC motor operating in open loop mode (without an encoder or tachometer feedback from the motor) and in closed loop mode (with a 1024 pulse per revolution encoder feedback from the motor). To demonstrate the torque producing capabilities, these plots were generated by operating the drive from no load at zero speed to maximum transient torque at various speeds. The autotune feature was configured. The gain parameter was adjusted to 50% and the stability parameter was adjusted to 50%. The available overtorque is a function of the motor design category. For typical NEMA Design B motors, the ATV58 TRX controller can deliver 200% of the nominal motor torque for 2 seconds, and 170% for 60 seconds.
Note the 200% transient torque produced by the ATV58 TRX Type H model, and note the torque producing capabilities at very low speeds.
Figure 3: ATV58 TRX Type H Controller Open Loop Maximum Transient Torque
Percentage of Rated Torque 250%
200%
150%
100%
50%
0%
0 | 3 | 6 | 10 | 20 | 30 | 40 | 50 | 60 | Hz |
TypeHOpnTrq.eps
Figure 4: ATV58 TRX Type H Controller w/ Digital Encoder Card, Maximum Transient Torque
Percentage of Rated Torque |
|
|
|
|
| TypeHEncTrq.eps | |||
250% |
|
|
|
|
|
|
|
| |
200% |
|
|
|
|
|
|
|
|
|
150% |
|
|
|
|
|
|
|
|
|
100% |
|
|
|
|
|
|
|
|
|
50% |
|
|
|
|
|
|
|
|
|
0% |
|
|
|
|
|
|
|
|
|
0 | 3 | 6 | 10 | 20 | 30 | 40 | 50 | 60 | Hz |
Operation in overspeed:
•In overspeed operation, the voltage no longer increases with the frequency, resulting in reduced induction in the motor which results in loss of torque. Consult the motor manufacturer to ensure that the motor can operate in overspeed.
•For a special motor, the nominal frequency and the maximum frequency can be adjusted between 10 and 500 Hz using the keypad display, PowerSuite, or Commissioning software.
96
© |
| 09/2003 |
| ||
|
|
|