GPIB OPERATION | SERVICE REQUEST STATUS (SRQ) |
2.Request data from display channel 1 by sending:
O 1
The SRQ will be set with the new reading which will now be in the output buffer ready to be read. The data should now be read so that the MAV bit will be cleared. If the data is not read, or the output buffer not cleared, and another re- quest for data is made this data will be buffered after the previous data.
Getting a Reading The 488.2 standard requires that the data can only be read from the device after it has been requested. Any data requested from the device is made available to be read, and is stored in an output buffer.
As long as there is data in the output buffer to be read, the Message AVailable (MAV) bit in the status byte is set. This bit allows data to be requested and, as soon as the data is available, the MAV bit is set, from which a service request can be produced (SRQ).
The ML243X allows this output buffer to be turned off using the BUFF OFF com- mand. In this mode of operation, if a number of data requests are made with out reading the data after each request, only the last data requested is available.
Note that this does not include the serial poll request which is handled independently.
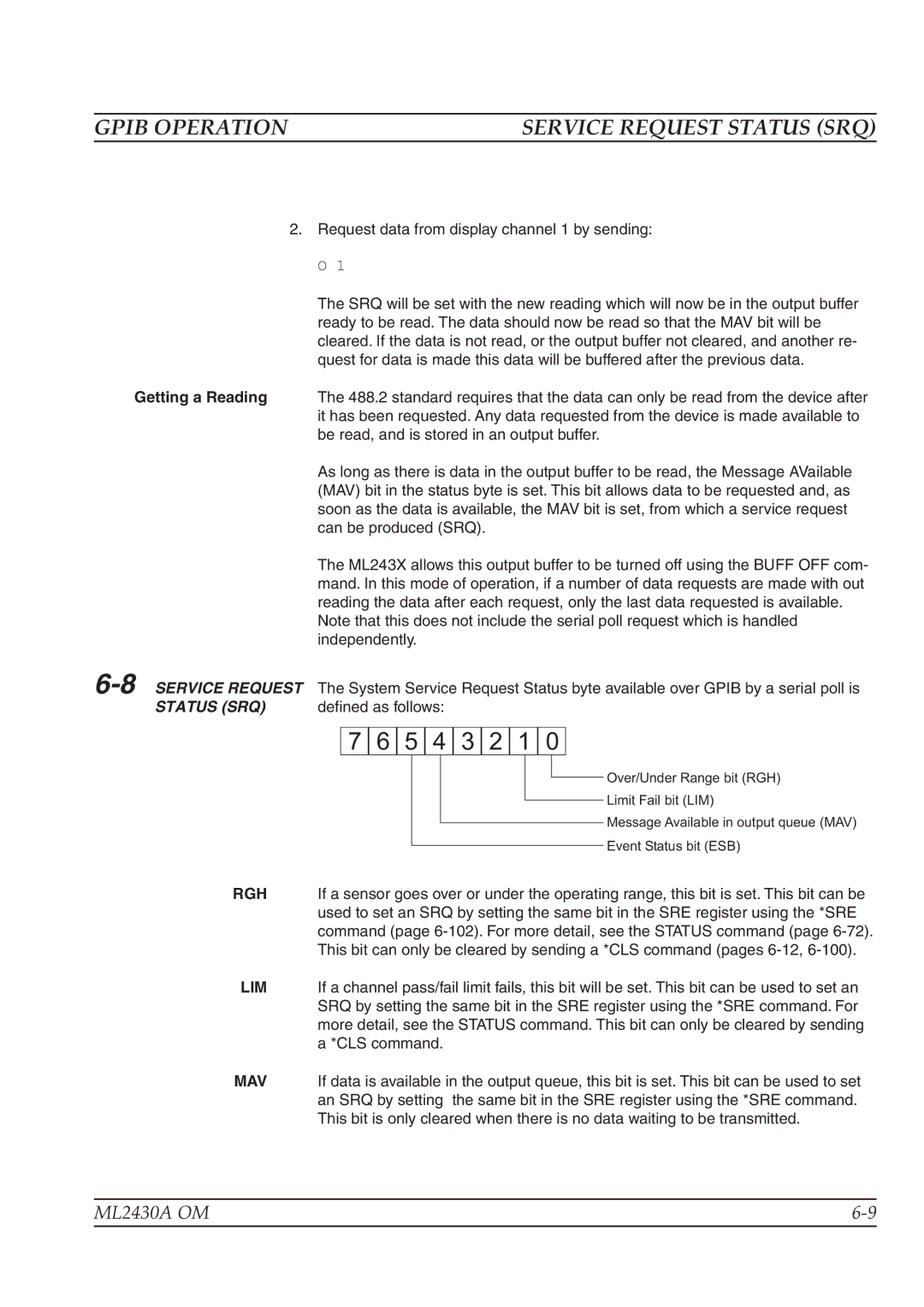
| The System Service Request Status byte available over GPIB by a serial poll is | |||||||||||||||
STATUS (SRQ) | defined as follows: |
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Over/Under Range bit (RGH) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Limit Fail bit (LIM) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Message Available in output queue (MAV) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
RGH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Event Status bit (ESB) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
If a sensor goes over or under the operating range, this bit is set. This bit can be | ||||||||||||||||
| used to set an SRQ by setting the same bit in the SRE register using the *SRE | |||||||||||||||
| command (page | |||||||||||||||
| This bit can only be cleared by sending a *CLS command (pages | |||||||||||||||
LIM | If a channel pass/fail limit fails, this bit will be set. This bit can be used to set an | |||||||||||||||
| SRQ by setting the same bit in the SRE register using the *SRE command. For | |||||||||||||||
| more detail, see the STATUS command. This bit can only be cleared by sending | |||||||||||||||
| a *CLS command. |
|
|
|
|
|
|
|
|
| ||||||
MAV | If data is available in the output queue, this bit is set. This bit can be used to set | |||||||||||||||
| an SRQ by setting the same bit in the SRE register using the *SRE command. | |||||||||||||||
| This bit is only cleared when there is no data waiting to be transmitted. | |||||||||||||||
ML2430A OM | |
|
|