Startup Wizard Requirements
The Startup Wizard queries the user for information on the input and output signal parameters of the ASD. The ASD may also be setup by directly accessing each of the control settings via the Program menu or the Direct Access Numbers (see the section titled Direct Access Parameter Information on pg. 59).
Upon initial system powerup, the Startup Wizard starts automatically. It may also be run from the Program menu after startup if required. The user is queried to either (1) run the Startup Wizard (Run Now), (2) run the Startup Wizard at the next power up, or (3) perform a manual setting of
If selection (2) is chosen, the system returns to the Program menu and defaults to the Startup Wizard on the next power up. If selection (3) is chosen, click the subsequent Finish box and the system returns to the Frequency Command screen. If selection (1) (Run Now) is selected, the Startup Wizard will start and assist the user with the configuration of the G7 True Torque Control2 Adjustable Speed Drive using the following
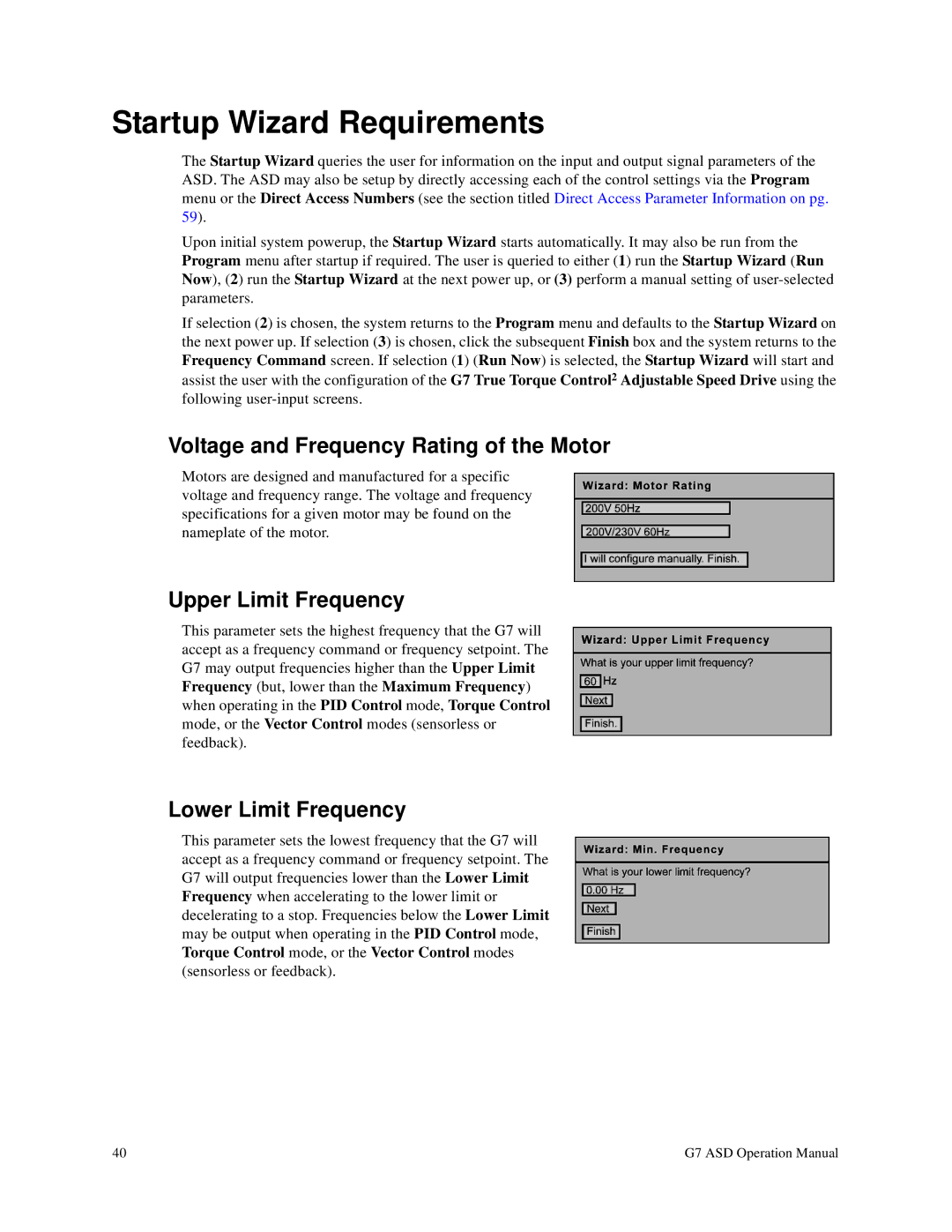
Voltage and Frequency Rating of the Motor
Motors are designed and manufactured for a specific voltage and frequency range. The voltage and frequency specifications for a given motor may be found on the nameplate of the motor.
Upper Limit Frequency
This parameter sets the highest frequency that the G7 will accept as a frequency command or frequency setpoint. The G7 may output frequencies higher than the Upper Limit Frequency (but, lower than the Maximum Frequency) when operating in the PID Control mode, Torque Control mode, or the Vector Control modes (sensorless or feedback).
Lower Limit Frequency
This parameter sets the lowest frequency that the G7 will accept as a frequency command or frequency setpoint. The G7 will output frequencies lower than the Lower Limit Frequency when accelerating to the lower limit or decelerating to a stop. Frequencies below the Lower Limit may be output when operating in the PID Control mode, Torque Control mode, or the Vector Control modes (sensorless or feedback).
40 | G7 ASD Operation Manual |