SmartWare Release
Patton Electronics Company, Inc
Summary Table of Contents
SmartWare Software Configuration Guide
Table of Contents
Command line interface CLI
Copying configurations to and from a remote storage location
IP context overview
11 NAT/NAPT configuration
Serial port configuration
PRI port configuration
Isdn Overview
Basic IP routing configuration
Snmp configuration
Dhcp configuration
CS context overview
VPN configuration
CS interface configuration
FXO interface configuration
SIP interface configuration
Table of Contents
524
45 H.323 gateway configuration
Pstn profile configuration
Location Service
Terms and definitions
List of Figures
SmartWare Software Configuration Guide
List of Tables
Audience
How to read this guide
About this guide
Structure
About this guide
About this guide
Garamond bold type
Precautions
Typographical conventions used in this document
General conventions
SmartWare Software Configuration GuideAbout this guide
Fax +1 253
Service and support
Mouse conventions
Patton support headquarters in the USA
Patton Electronics Company
Warranty coverage
RMA numbers
System overview
Chapter contents
Introduction
IP Router
Circuit Switch
SmartWare embedded software
VoIP Gateway
Carrier networks
Applications
WAN
Enterprise networks
Typical LAN telephony system with a SmartNode gateway
LAN telephony
Configuration concepts
Configuration concept overview
Gateway
Contexts and Gateways
Context
Example
Bindings
Interfaces, Ports, and Bindings
Interfaces
Ports and circuits
Profiles
Profiles and Use commands
Use Commands
Command line interface CLI
Operator exec mode, the system prompt is displayed as
Command modes
CLI prompt
Navigating the CLI
Command editing
Command help
Command completion
Command Editing Shortcuts
Command history
Accessing the CLI
If desired
Accessing the SmartWare CLI task list
Ending a Telnet or console port session see
Accessing via the console port
Console port procedure
Disabling the Telnet server
Accessing via a Telnet session
Telnet Procedure
Using an alternate TCP listening port for the Telnet server
Login display
Selecting a secure password
Creating an operator account
Password encryption
Factory preset administrator account
Configuring operators and administrators
Nodecfg#copy running-config startup-config
Creating an administrator account
Name and password password
Opening a secure configuration session over SSH
Displaying account information
Mode Enable
Displaying the CLI version
Node who
Switching to another account
Checking identity and connected users
Node# who
Command index numbers
Used in operator execution mode
Accessing the CLI
Ending a Telnet or console port session
Showing command default values
System image handling
System image handling
Memory regions in SmartWare
Local Persistent Volatile Flash
System image handling task list
Show version
Displaying system image information
Copying system images from a network server to Flash memory
Step Command Purpose
Upgrading the software directly
Here’s an example for configuration provisioning
Auto provisioning of firmware and configuration
Explanation
To use and debug provisioning
Boot procedure
Boot procedure
IP Addresses in the Factory Configuration
Default Startup Configuration
Factory configuration
Configuration file handling
Understanding configuration files
Configuration file handling
Sample configuration file
Configuration file handling task list
Local Memory Regions
Copying configurations within the local memory
Name into the local memory
Node# copy nvram backup startup-config
Backup already present in flash memory
Name nvramtarget-name
Remote memory regions for SmartWare
Copying configurations to and from a remote storage location
New-startupnvramstartup-config
Displaying configuration file information
Nodecfg# copy tftp//ip-addressport
Modifying the running configuration at the CLI
Node#reload
Modifying the running configuration offline
Node#copy running-config tftp//node-ip
Delete the configuration named minimal explicitly
Example Modifying the running configuration offline
Deleting a specified configuration
Example Deleting a specified configuration
Auto provisioning
CLI copy command copy tftp//host/path config-file
Encrypted file download
Encrypted Configuration Download
Use Cases
Install a custom encryption key optional
Upload an encrypted configuration file
Encrypt a configuration file
Download an encrypted configuration file
Basic system management
Basic system management configuration task list
Name licenses Licenses
Managing feature license keys
Downloads the license key file and install
Node cfg#copy tftp//tftp-server/path/file
Setting system information
System banner with message to operators
Setting the system banner
Display clock information
Setting time and date
De en
Display time since last restart
Configuring the Web server
Determining and defining the active CLI version
Displaying the system logs
Restarting the system
Unit
Controlling command execution
Displaying reports
Bring job 0 to foreground
Ctrl-zsuspend active command
Show the currently running commands
Ctrl-cterminate current command
Displaying the checksum of a configuration
Timed execution of CLI command
Mode System
Some examples
Name sys#no terminal idle-time
Radius Client Configuration
AAA component
General AAA Configuration
Authentication procedure with a Radius server
Nodecfg#show profile authentication
Nodecfg#profile authentication name
Nodepf-authname#server-timeout
Authentication profile-name
Radius configuration
Example Configure the Radius clients as shown in figure
Configuring Radius clients
Vendor
Configuring Radius accounting
109
Attributes in the Radius request message
Configuring the Radius server
Attributes in the Radius accept message
Configuring the local database accounts
Base. The no form removes an existing account
Example Create an administrator and an operator account
Word password
Password
Storing call logs with quality information
IP context overview
IP context and related elements
IP context overview configuration task list
IP interface related information
Planning your IP configuration
Configuring physical ports
Creating and configuring IP interfaces
Configuring RIP
Configuring Napt
Configuring static IP routing
Configuring quality of service QoS
Configuring access control lists
IP interface configuration
Nodeif-ip name#
IP interface configuration task list
Creating an IP interface
Nodectx-iprouter#interface name
Deleting an IP interface
Inside
Setting the IP address and netmask
Configuring a Napt DMZ interface
Name if-ip if-name# no napt
Router advertisement broadcast message
Icmp message processing
Icmp redirect messages
MTU packet size value must be in the range from
Nodeif-ipname#tcp adjust-mss
Defining the MTU and MSS of the interface
Example Defining the MTU of the interface
Displaying IP interface information
Configuring an interface as a point-to-point link
Processing gratuitous ARP requests
Testing connections with the ping command
Displaying dynamic ARP entries
Flushing dynamic ARP entries
Node#ping address num
Mode Either operator or administrator execution
Ber timeout seconds
IP link supervision
Debug ARP
Check connectivity of an IP link
Show IP link status
Debug connectivity
Example Debug ARP output
Traceroute
Example Display the ARP information
Configuring the Igmp Proxy
NAT/NAPT configuration
Dynamic Napt
Dynamic NAT
Tftp because the SmartNode might become inaccessible
Static Napt
Napt traversal
Static NAT
Optional
NAT/NAPT configuration task list
Creating a Napt profile
Node cfg#profile napt name
AH, ESP, GRE, or IPv6 respectively directed to
Configuring a Napt DMZ host
Defining Napt port ranges
Optional Ahespgreipv6 localip
Name pf-napt pf-name# udp-handling symmetricaddress
Preserving TCP/UDP port numbers in Napt
Defining the UDP Napt type
Node cfg#show profile napt
Activate NAT/NAPT
Displaying NAT/NAPT configuration information
Node cfg#context ip router
Configuring NAT static protocol entries
Mode profile napt pf-napt
Example Display NAT/NAPT configuration information
Ethernet port configuration
Configuring medium for an Ethernet port
Entering the Ethernet port configuration mode
Ethernet port configuration task list
Configures the encapsulation type to IP
Configuring Ethernet encapsulation type for an Ethernet port
Binding an Ethernet port to an IP interface
Nodeprt-eth slot/port#encapsulation ip
Nodeprt-eth slot/port#bind interface name router
Multiple IP addresses on Ethernet ports
Configuring a Vlan
Nodevlanid#bind interface name router
Nodeconfig#port ethernet slot port
Nodeprt-ethslot/port#vlan id
Nodevlanid#encapsulation ippppoemulti
Nodeprt-eth slot/port#cos rx-map layer
Adding a receive mapping table entry
Example Adding a receive mapping table entry
Closing an Ethernet port
Adding a transmit mapping table entry
Using the built-in Ethernet sniffer
Nvramethernet-0-0-1.cap
Following is an example of how the sniffer is normally used
Nvramethernet-0-slot-port.cap
Link scheduler configuration
Applying scheduling at the bottleneck
Using traffic classes
Shaping
Weighted fair queuing WFQ
Introduction to Scheduling
Priority
Hierarchy
Burst tolerant shaping or wfq
Quick references
Setting the modem rate
Source traffic-class class
Command cross reference
Policy-map policy-map Profile service-policy
Link scheduler configuration task list
Packet classification
Enable statistics gathering see
Defining the access control list profile
Scenario with Web server regarded as a single source host
Creating an access control list
Nodepf-acl name#permit ip any any
Creating a service policy profile
Nodecfg#profile acl name
Nodepf-acl name#permit ip host ip-address any traffic-class
Structure of a Service-Policy Profile
Specifying the handling of traffic-classes
Defining fair queuing weight
Defining absolute priority
Mode Source
Specifying the type-of-service TOS field
Defining the bit-rate
Nodesrc name#set ip precedence value
Specifying differentiated services codepoint Dscp marking
Specifying the precedence field
Nodesrc name#set ip tos value
Value is from 0 to
Defines the Class-Of-Service value applied to packets of for
Specifying layer 2 marking
Nodesrc name#set ip dscp value
Nodesrc name#random-detect burst-tolerance
Quality of Service for routed RTP streams
Defining random early detection
Discarding Excess Load
Mode profile service-policy/profile
Policy name in out
Devoting the service policy profile to an interface
Nodeif-ip if-name#use profile service
Displaying link scheduling profile information
Enable statistics gathering
Displaying link arbitration status
Optional Value Implication on Command Output
Serial port configuration
Disabling an interface
Serial port configuration task list
Enabling an interface
Port
Configuring the serial encapsulation type
Configuring the hardware port protocol
Configuring the active clock edge
Baudrate
Configuring the baudrate
176
Frame Relay configuration
Configuring Frame Relay encapsulation
Frame Relay configuration task list
Configuring the keep-alive interval
Configuring the LMI type
For this PVC only FRF.12 end-to-end fragmentation
Enabling fragmentation
Ber to be used on the specified virtual circuit
Nodepvc dlci#fragment size
Entering Frame Relay PVC configuration mode
Binding the Frame Relay PVC to IP interface
Configuring the PVC encapsulation type
IP interface wan is bound to PVC 1 on port serial 0
Mode PVC
Disabling a Frame Relay PVC
Enabling a Frame Relay PVC
Debugging Frame Relay
Displaying Frame Relay information
Integrated service access
188
Check that the Frame Relay settings are correct
Configure the serial interface settings
Example 2 Frame Relay on e1t1 with a channel-group
PRI port configuration
PRI port configuration task list
Terminology
Configuring PRI clock-mode
Enable/Disable PRI port
PRI Debugging
Configuring PRI port-type
Name prt-e1t1 slot/port# framing
Configuring PRI framing
Name prt-e1t1 slot/port# linecode
Ami b8zs hdb3
Configuring PRI application mode E1T1 only
Configuring PRI line-build-out E1T1 in T1 mode only
Configuring PRI used-connector E1T1 in E1 mode only
Configuring PRI Loopback detection E1T1 only
Configuring PRI LOS threshold E1T1 only
Configuring PRI encapsulation
Default disabled
Configuring Channel-Group Encapsulation
Mode channel-group group-name
Create a Channel-Group
Configuring Channel-Group Timeslots
Configuring Hdlc CRC-Type
Entering Hdlc Configuration Mode
Mode channel-group group
Mode hdlc
PRI Debugging
Default no encapsulation
Configuring Hdlc Encapsulation
PRI Configuration Examples
Example 3 RBS with a channel-group
Example 1 Isdn
Example 2 RBS without a channel-group
Example 4 Frame Relay without a channel-group
Example 7 PPP with a channel-group
Example 5 Framerelay with a channel-group
Example 6 PPP without a channel-group
BRI port configuration
Configuring BRI clock-mode
Enable/Disable BRI port
BRI port configuration task list
Creating a channel group
Configuring BRI Power-Feed
Feed Default disabled
Configuring BRI encapsulation
Timeslots timeslots
Default no timeslots
Name ch-grp group-name#no Selects the timeslot to be used
Name#show port bri
BRI Debugging
Name#no debug bri
BRI Configuration Examples
Example 1 Isdn with auto clock/uni-side settings
Example 2 Isdn with manual clock/uni-side settings
Example 3 Multi-Link PPP over two B-Channels
Isdn Overview
Isdn reference points
Isdn reference points
Possible SmartNode port configurations
Isdn UNI Signaling
215
Isdn Layering
Isdn Configuration Concept
Isdn configuration
Configuring Q.921 parameters
Enter Q.921 configuration mode
Mode base-mode
Isdn configuration task list
Configuring Q.921 encapsulation
Mode q921
Enter Q.931 configuration mode
Configuring Q.931 parameters
Mode q931
Pss1old
Nodeq931slot/port#signalling-rule
Nodeq931slot/port#no signalling-rule
Etsi
Control interface
Configuring Q.931 encapsulation
Debugging Isdn
Face if-name
Node#show port isdn slot port detail level
Isdn Configuration Examples
Example being clock slave on uni network interface
Example PRI
Example Qsig
Assume the scenario as illustrated in figure
RBS configuration
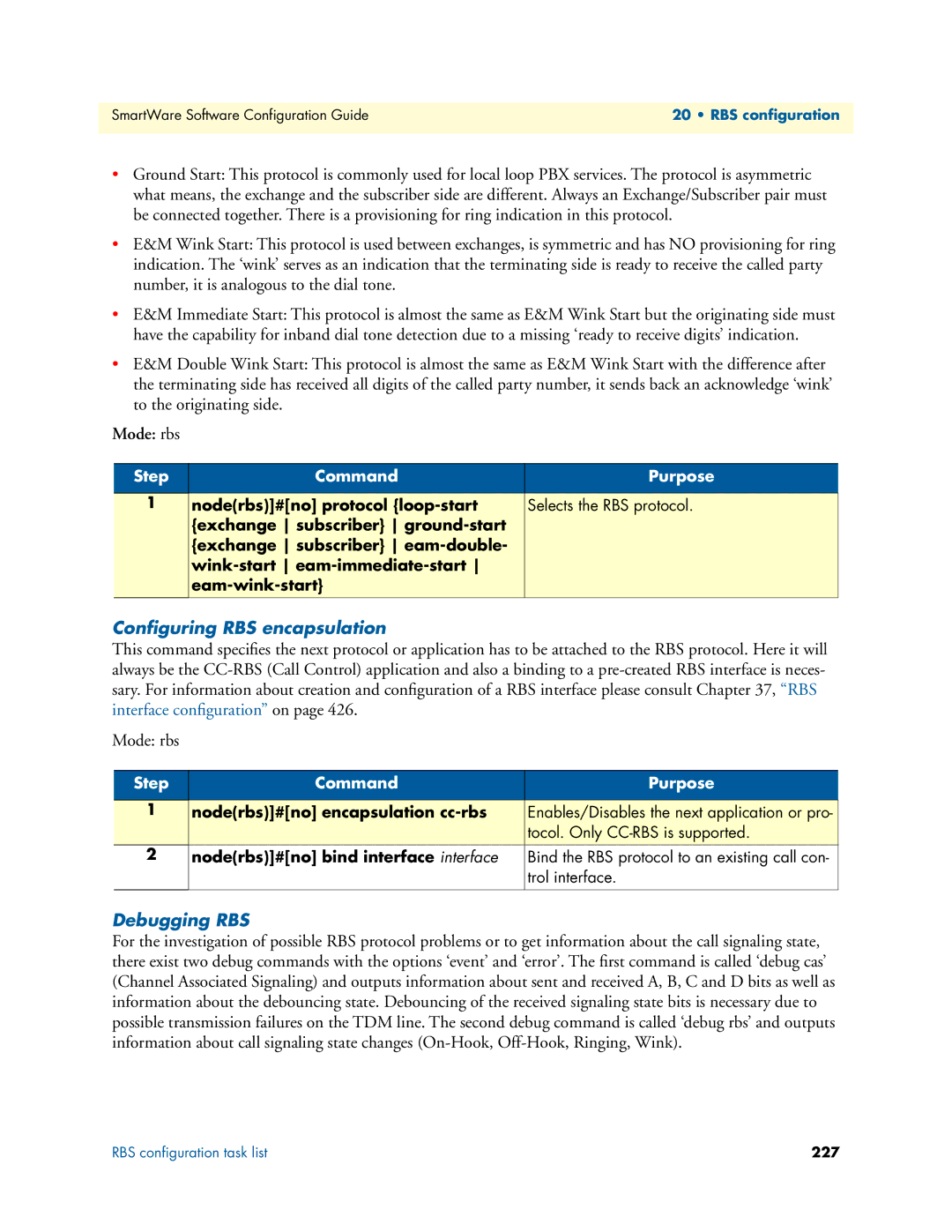
Configuring RBS protocol
Enter RBS configuration mode
RBS configuration task list
Noderbs#no encapsulation cc-rbs
Mode rbs
Configuring RBS encapsulation
Debugging RBS
Example Configuring RBS Ground Start on a E1T1 port
RBS Configuration Examples
229
DSL Port Configuration
Configuring PPPoE
Line Setup
Profile napt WAN
Configuration Summary
Using PVC channels with PPPoE
Setting up permanent virtual circuits PVC
Using PVC channels in bridged Ethernet mode
Link State
Troubleshooting DSL Connections
Diagnostics
PPPoE access
Basic IP routing configuration
Policy routing
Basic IP routing configuration task list
Routing tables
Static routing
Adds a static route
Displaying IP route information see
Configuring static IP routes
Nodecfg#context ip router Enters the IP router Context
Displaying IP route information
Deleting static IP routes
0.0/0 172.16.32.2 Static
Configuring policy routing
Basic static IP routing example
Examples
Changing the default UDP port range for RTP and Rtcp
RIP configuration
Routing protocol
Enabling send RIP
RIP configuration task list
Specifying the send RIP version
Enabling an interface to receive RIP
Enabling RIP learning
Example Enabling RIP learn host and default
Specifying the receive RIP version
Enabling RIP announcing
Enabling RIP auto summarization
Specifying the default route metric
Enabling the poison reverse algorithm
Enabling RIP split-horizon processing
Nodeif-ipname#rip route-expiry
Setting the RIP route expiry
3600 Default 180 seconds
Enabling holding down aged routes
Displaying global RIP information
Displaying RIP configuration of an IP interface
252
Access control list configuration
Why you should configure access lists
About access control lists
What access lists do
Features of access control lists
When to configure access lists
Mapping out the goals of the access control list
Access control list configuration task list
Nodepf-acl name#permit ip src src-wildcard any
Where the syntax is
Any host src dest dest-wildcard any host dest
Nodepf-acl name#permit icmp src src-wildcard any
Type type type type code code cos group
Nodepf-acl name#deny icmp src src-wildcard
Code code
Where the syntax is as following
Msg name
Type type
Nodepf-acl name#deny tcp udp sctp src src
Nodepf-acl name#permit tcp udp sctp src src-wild
Card any host src eq port gt port lt port range
Port lt port range from to cos group cos-rtp group
Range from to
Eq port
Lt port
Gt port
Where the syntax is
Debugging an access control list profile
Unbind an access control list profile from an interface
Displaying an access control list profile
Control list profile shall be debugged
Denying a specific subnet
Commands that have to be entered are listed below
Snmp configuration
Snmp basic components
Snmp basic commands
Simple Network Management Protocol Snmp
Network management framework
Identification of a SmartNode via Snmp
Snmp management information base MIB
Snmp configuration task list
Setting basic system information
Snmp tools
271
Example Setting the system group objects
Setting access community information
Ro rw Or read/write access
Nodecfg#snmp target IP-address-of-SN
Setting allowed host information
Specifying the default Snmp trap target
Nodecfg#snmp host IP-address-of-SN security
Displaying Snmp related information
Using the AdventNet Snmp utilities
AdventNet MibBrowser Settings Button on the Toolbar
Using the MibBrowser
AdventNet TrapViewer displaying received traps
Using the TrapViewer
Specific Type
TimeStamp
Enterprise
Generic Type
Standard Snmp version 1 traps
Snmp interface traps
281
Sntp client configuration
Sntp client configuration task list
Unicast anycast multicast
Defining Sntp client operating mode
Selecting Sntp time servers
Defining Sntp local UDP port
Defining Sntp client poll interval
Enabling and disabling the Sntp client
Example Enabling the Sntp client operation
Example Disabling the Sntp client operation
Displays the local time, UTC and the offset of the local
Defining Sntp client constant offset to GMT
Defining the Sntp client anycast address
Name #show clock local
Nodecfg#sntp-client anycast-address ip
Example Enabling the Sntp client root delay compensation
Enabling and disabling local clock offset compensation
Debugging Sntp client operation
Example Disabling the Sntp client root delay compensation
Showing Sntp client related information
Example Showing Sntp client related information
Recommended public Sntp time servers
Nist Internet time service
291
Dhcp configuration
Dhcp configuration
DHCP-server and DHCP-client are illustrated in figure
Enable DHCP-client on an IP interface
DHCP-client configuration tasks
‘configure’ configuration mode
Example Enable DHCP-client on an IP interface
Get debug output from DHCP-client
Mode Any
Example Enable Dhcp debug monitor
Release or renew a Dhcp lease manually advanced
Configure DHCP-server profiles
DHCP-server configuration tasks
Nodepf-dhcpsname#network ip
Nodepf-dhcpsname#no default
Nodepf-dhcpsname#no netbios
Nodecfg#profile dhcp-server name
All ip-address
Use DHCP-server profiles and enable the DHCP-server
Nodepf-dhcpsname#no bootfile boot
Nodepf-dhcpsname#no next-server
Check DHCP-server configuration and status
Define the bootfile Option 67 for the DHCP-server
Define the Tftp server Option 66 for the DHCP-server
Get debug output from the DHCP-server
Create/Modify DHCP-Relay profile
Configure DHCP-relay
Enable/Disable DHCP-Relay Agent
DNS configuration
Server-ip-address
DNS configuration task list
Enabling the DNS resolver
Enabling the DNS relay
DNS relay diagram
307
DynDNS configuration
Creating a DynDNS account Configuring the DNS resolver
DynDNS configuration task list
Word
Configuring basic DynDNS settings
Configuring the DynDNS server
Defining a mail exchanger for your hostname
Configuring advanced DynDNS settings optional
Mode DynDNS
Troubleshooting
312
PPP configuration
314
Nodeif-ipname#point-to-point
PPP configuration task list
Creating an IP interface for PPP
Nodeif-ipname# ipaddress ip-address
Nodeif-ipname# no tcp adjust-mss
Nodeif-ipname#ipaddress
Nodeif-ipname#ipaddress dhcp
Nodecfg # subscriber ppp name
Disable interface IP address auto-configuration from PPP
Creating a PPP subscriber
Nodeif-ipname#use profile napt name
Nodesubscrname# no identification
Optional outboundinbound user password
Nodesubscrname# dial inout
Chap pap chappap
Configuring a PPPoE session
Trigger forced reconnect of PPP sessions using a timer
Tor AC-Name
Optional file
Case authentication is required
Configuring PPP over a Hdlc Link
Creating a PPP profile
Nodepf-pppname#mru min min max
Default
Nodecfg #no profile ppp name
Nodepf-pppname#mtu min min max
Name pf-ppp profile# mrru min
Min max max default
Default
Configuring the local and remote PPP Mrru
Example Display PPP subscriber configuration information
Displaying PPP configuration information
Debugging PPP
Example Display a PPP profile
Nodecfg #show port interface name
Nodecfg #show ppp links level
Nodecfg #show ppp networks level
Nodecfg #show pppoe name
LCP
Example Display PPP link information
Example Display PPPoE information
Example Display PPP network protocol information
PPP over Ethernet PPPoE
Without authentication, encapsulation multi, with Napt
With authentication, encapsulation PPPoE
Sample configurations
PPP over a Hdlc Link E1T1 Port
Without authentication, numbered interface
With authentication, unnumbered interface
PPP over a Hdlc Link Serial Port
PPP Dialer
PPP Dial-up over Isdn
Create outbound destinations
Following command creates a new PPP dialer Mode context cs
Dial-up and login information for a certain
Create a dialer
Configure recovery strategy
Case
Create inbound destinations
Name inboundprovider#remote-e164
Name if-dialerdialer#inbound
Name inboundprovider#local-e164
E164
Debug dialer functionality
Example Dial-on demand feature
Dial-up on demand
Dial-up
Dial-up nailed
Dial if possible, and never drop Mode context ip/interface
Dial-up on monitor
CS context overview
CS context configuration components
Planning the CS configuration
CS context configuration task list
Remote office in an Enterprise network
Configuring the clock source
Configuring general CS settings
Debugging the clock source
Mode Operator execution
Reference clock
Configuring call routing
Selecting PCM law compression
Node sys#clock-sourceslot-number port-number
Specify call routing
Creating and configuring CS interfaces
Configuring voice over IP parameters
Configuring dial tones
Configuring a SIP VoIP connection
Configuring Isdn ports
Configuring FXS ports
Configuring an H.323 VoIP connection
Activating CS context configuration
Level
Nodectx-csswitch#show call-router config detail
Node ctx-csswitch#debug call-router detail level
Nodectx-csswitch#show call-router status detail
SmartNode in an Enterprise network
CS Configuration
Planning the CS context
Configuring call routing
Configuring general CS settings
First we set clock-source to Isdn port 2/3
354
Configuring BRI ports
Configuring VoIP settings
Because we need G.723 as codec we enable Dtmf relay
We want to use this profile on our H.323 interfaces
Activating the CS context configuration
Next we configure call signaling
Configuring an H.323 VoIP connection
TAB-CALLED-NUMBER
Finally, activate the gateway and CS context
Configuration script for our application looks as follows
Showing the running configuration
359
360
361
VPN configuration
Encryption
Authentication
Key management
Transport and tunnel modes
Permanent IKE Tunnels
Creating an IPsec policy profile
VPN configuration task list
Creating an IPsec transformation profile
Example Create an IPsec transformation profile
Procedure To create an IPsec policy profile Mode Configure
Creating/modifying an outgoing ACL profile for IPsec
Displaying IPsec configuration information
Configuration of an IP interface and the IP router for IPsec
Example IPsec Debug Output
Example Display IPsec transformation profiles
Example Display IPsec policy profiles
Debugging IPsec
Creating an Ipsec transform profile
Key management IKE
Main differences between manual & IKE Ipsec configurations
Creating an Isakmp transform profile
Mode. The peer can either be an IP address or a
Creating an Isakmp Ipsec policy profile
Should be used. Do not specify a peer, if this pol
Icy shall be used for multiple peers in transport
Sample configuration snippet
Creating/modifying an outgoing ACL profile for Ipsec
Configuration of an IP interface and the IP router for Ipsec
Policy matching
Debug ike event
Debug ike error
Use profile acl WANOut out
Performance considerations
Encrypted Voice Performance considerations
Enabling RTP encryption support
Mode Context ip /interface if-name
SmartNode configuration
IPsec tunnel, DES encryption
Cisco router configuration
379
380
CS interface configuration
CS interfaces on the CS context
CS interface configuration task list
Nodeif-typeif-name#exit
Examples Create CS interfaces and delete another
Nodeif-typeif-name#…
384
Table table-name
Service service-name Nodeif- typeif-name #exit
Configuring the interface mapping tables
Specified direction
Table in table-name
That shall be applied to all call properties
And/or
Incoming call passing an interface mapping table
Call passing an input and an output mapping table
Configuring the precall service tables
Repeat to add other special number map
Supplementary service invocation commands
Number to command
Supplementary service invocation command
Isdn interface configuration
Isdn interfaces on the CS context
Isdn interface configuration task list
Defines an alternate Pstn profile to be used for
Configuring Dtmf dialing optional
Configuring an alternate Pstn profile optional
Nodeif-isdn if-name#no use profile
Disabling call-waiting on Isdn DSS1 network interfaces
Name if-isdn if-name# no call-waiting Disable call-waiting
Configuring ringback tone on Isdn user-side interfaces
Configuring call waiting optional
Configuring date/time publishing to terminals optional
Configuring Call-Hold on Isdn interfaces
Enabling Display Information Elements on Isdn Ports
Defining the ‘network-type’ in Isdn interfaces
Sending the connected party number Colp optional
Home Office
Isdn Advice of Charge support
398
If there is not charge information from the network
If there is no tariff information from the network for
All calls
Nodeif-isdnif- name# aoc-d automatic
NoChargeAvailable
Isdn User Interface Connected to a PBX switch etc
Following table shows an overview of the AOC variants
Isdn Network Interface connected to phones
Receive Direction
Mode interface isdn interface
Isdn DivertingLegInformation2 Facility
Transmit Direction
500
Nodeif-isdn#caller-name
Nodeif-isdn#caller-name early-alerting
Absence
Outgoing Isdn call. This feature is disabled
By default
Nodeif-isdn#caller-name ignore
FXS interface configuration
Configuring a subscriber number recommended
FXS interface configuration task list
Nameif-fxsname#no subscriber
Mode Interface FXS
Configuring caller-ID presentation optional
Configuring flash hook processing optional
Configuring ringing-cadence optional
Ing-indication stutter-dial-tone Through Stuttered Dial Tone
Configuring the Message Waiting Indication feature for FXS
Mat bell
Frequency-shift keying
Mat etsi
Call hold Call transfer
FXS supplementary services description
Tern
Default enabled
Call hold
Call waiting
Call toggle
Call waiting reminder ring
Drop passive call
Drop active call
Pattern
Conferencing
Call park
Nameif-fxsname#no drop-passive
FXO interface configuration
FXO interfaces on the CS context
Creating an FXO interface
FXO services description
Nodeif-fxo name #
Nodectx-csswitch#interface fxo name
Deleting an FXO interface
FXO off-hook on caller ID
FXO interface configuration task list
Nodeif-fxo if-name#
Configuring when the digits are dialed optional
Nodectx-csswitch#interface fxo if-name
Nodeif-fxoif-name#
Nodeif-fxoif-name#dial-after dial-tone timeout seconds
Figuration mode
Nodeif-fxo if-name #ring-number count
Nodeif-fxo if-name#
Min min-time max max-time
Configuring how to detect a call has disconnected optional
Battery-reversal tax-pulse
Nodeif-fxo if-name#no connect-signal
FXO Mute dialing
Configuring the destination of the call
FXO interface examples
RBS interface configuration
Name Face, the ‘no’ form deletes an existing one
RBS interface configuration task list
Creating/Deleting a RBS interface
Configuring an alternate Pstn profile
Configuring B-Channel allocation strategy
Mode Interface RBS
Configuring additional disconnect signals
Configuring an alternate Tone-Set profile
Configuring ready to dial strategy
Nodeif-rbsif-name#no dial-after dial- tone timeout seconds
Node#no debug ccrbs datapath error signaling
Configuring number of Rings before Off-Hook
Node#show ccrbs interface if-name detail
Node#show ccrbs call if-name detail level
Prints information about ongoing calls on
Selected interface
Interface configuration
Interface configuration task list
Examples Define the IP address of the remote H.323 entity
Binding the interface to an H.323 gateway
Configuring an alternate VoIP profile optional
Node if- h323 if-name #itc tx 3k1
Configuring CLIP/CLIR support optional
Node if- h323 if-name #itc rx 3k1
Specifies the information transfer capability to
Nameif-h323name#early-connect
Enabling ‘early-proceeding’ on H.323 interfaces
Enabling the early call connect optional
Nameif-h323if-name#early-proceeding
Enabling the via address support optional
Enabling the early call disconnect optional
Ing connection should be established
Configuring status inquiry settings optional
Nodeif-h323if-name# remoteport port
AOC-D Support for H.323
Nodeif-h323if-name# no aoc-d emit
Mode context cs/interfce h.323 interface-name
Nodeif-h323if-name# no aoc-d
SIP interface configuration
SIP interface configuration task list
SIP
Sip-gateway gw-name
Binding the interface to a SIP gateway
Configure a remote host
Nodeif-sipif-name# no bind context
Nodeif-sipif-name# no local host
Using an alternate VoIP profile Optional
Configuring a local host Optional
Nodeif-sipif-name# no remote host
Nodeif-sipif-name#use profile sip pro
Using an alternate SIP profile Optional
Using an alternate Tone-Set profile Optional
Nodeif-sipif-name#use profile voip
Mapping call-control properties in SIP headers
Configuring early call connect / disconnect Optional
Configuring address translation Optional
Header
Mapping SIP headers to call-control properties
Configuring Isdn Redirecting Number Tunneling Over SIP
Updating caller address parameters
SIP Diversion Header
450
SIP Refer Transmission & Isdn Explicit Call Transfer support
452
Name if-sip interface#no aoc-d emit
AOC Over SIP Optional
Name if-sip interface#no aoc-d
Accept
Enabling the SIP penalty-box feature Optional
Enabling the session timer Optional
Configure the SIP hold method Optional
Default zero-ip
Call router configuration
Call router configuration
458
Direct call routing vs. advanced call routing
Map out the goals for the call router
Call router configuration task list
Configure general call router behavior
Enable advanced call routing on circuit interfaces
Configure address completion timeout
Digit-collection terminating-char char
Example Configure address completion timeout
Address-completion timeout timeout
Digit-collection timeout timeout
National-prefix prefix
Procedure To configure number prefix Mode Context CS
Configure number prefix for Isdn number types
Example Configure number prefix
Create a routing table
Configure call routing tables
Calling-e164
Regular Expressions
Example Called party number routing table
Called party number routing table
Symbol Description
Digit Collection
Digit Collection Variants
Example Digit collection of any number
Dialed Selected Description Number Entry
Number type routing table
Calling party number routing table
Numbering plan routing table
IP address routing table
Name routing table
Dot . means ‘any character’ in a regular expression
Presentation Indicator Routing Table
URI routing table
Smith must be escaped with a backslash \, because
Screening Indicator Routing Table
Information transfer capability routing table
478
Example Day of week routing table
Default Any other unhandled case Mode context cs
Time of day routing table
Day of Week Routing Table
Resulting running-config is
Procedure To delete an entire routing table
Node ctx-cs switch #routing-table
Deleting routing tables
Delete the routing table table-name
Node ctx-cs switch #no routing-table
Example Remove an entire routing table
Configure mapping tables
Type Description Input-Type Description Output-Type
Sets the display name of the called
Mapping table examples
Away the input-type and output-type
Example Called and calling party manipulation mapping table
To E.164 Mapping Tables
Input-type to output-type table-name
486
487
Other mapping tables
Custom SIP URIs from called-/calling-e164 properties
Enter the mapping table from which you want to remove an
Node ctx-cs switch #mapping-table
Deleting mapping tables
Creating complex functions
Procedure To delete an entire mapping table Mode Context CS
Example Remove an entire mapping table
Deleting complex functions
Example Create a complex function
Ingress interface
Example Remove an entire complex function
Digit collection & sending-complete behavior
Sending-Complete
323
Call-Router
123#
Yes
True
Egress Interface
Complete-indication clear
Mode context cs / interface sip
Creating a hunt group service
Creating call services
Hunt group service
Call dest-interface interface-name
Node ctx-cs switch #service hunt
Call dest-service service-name
Cause cause
Normal Event
Default Behavior Class Cause Hunt Description Group Service
No-user-responding Drop original call
Option Not
Service or
Resource
Unavailable
Invalid Message
Implemented
Protocol Error
Interworking
Distribution group service
Creating a distribution group service
With the first configured destinations
Node ctx-cs switch #service distribu
Nodesvc-huntservice-name# route call
Dest-service service-name
Call-router ‘limiter’ service
Distribution-Group Min-Concurrent setting
‘Limiter’ service diagram
Priority service
Priority service diagram
Bridge
CS Bridge service-‘VoIP Leased Line’
Bridge services diagram
Configuration Example
Configuring the service second-dialtone
Activate the call router configuration
Deleting call services
Example Create and test a routing table
Test the call router configuration
516
Call routing example network
518
CS context and call router elements
520
Configure partial rerouting
Call reroute
Mode context cs/interface sip
Enable push-back aaa service
Mode context cs/service aaa
Enable push-back limiter service
Enable push-back bridge service
Enable push-back distribution-group service
Enable push-back hunt group service
SIP call-router services
Name ctx-csswitch#no service sip
SIP conference-service
SIP conference-service configuration task list
Entering conference-service configuration mode
Ference-server host-name port
SIP location-service
Mode Service SIP conference
Configuring the conference server
Entering SIP location-service configuration mode
SIP location-service configuration task list
Seconds
Binding a location service
Configuring the hunt timeout
Configuring multi-contact behavior
Tone configuration
Tone-set profiles
Configuring call-progress-tone profiles
Tone configuration task list
Configure tone-set profiles
Procedure To configure a tone-set profile Mode Configure
For which a tone indication can be provided
Enable tone-set profile
Procedure To assign a tone-set profile to a Pstn interface
Name Cific with name name
Show call-progress-tone and tone-set profiles
Example Show tone-set profile
Node#show profile call-progress-tone
Following example shows how to display the tone-set profile
536
FXS port configuration
Shutdown and enable FXS ports
Netherlands
Bind FXS ports to higher layer applications
Configure country-specific FXS port parameters
Nodeconfig#port fxs slot port
Mode IC voice in system
Enter FXS port configuration mode
Other FXS port parameters
Example
FXO port configuration
Bind FXO ports to higher layer applications
Shutdown and enable FXO ports
Nodeprt-fxo slot/ port#use
Configure country specific FXO port parameters
Other FXO port parameters
Nodeconfig#port fxo slot port
Enter FXO port configuration mode
Gateway configuration
Gateway between IP and CS contexts
Binding the gateway to an IP interface
Mode Gateway H.323
Enable the gateway
Gateway configuration task list
Configure registration authentication service RAS Optional
Ery auto gkid
Configure H.235 Security optional
Node gw-h323h323#gatekeeper-discov
235 configuration
Procedure To enable H.235 security on H.323 gateway
Node gw-h323h323#h235security pass
\getcryptopassword h235-password mas
Word h235-password encrypted
Node gw-h323h323#h235security master
Detail debug-level
Default setting is
Command show h235-securityshows the current setting
Signaling message
Enabling H.245 Tunneling
Advanced configuration options optional
Nodegw-h323h323#faststart Enables the fastconnect procedure
Enabling the fastconnect procedure
Enabling the early H.245 procedure
Nodegw-h323h323#h245-tunneling Enables H.245 tunneling
Port Naling connections
Configuring the traffic class for H.323 signaling
Setting the response timeout
Nodegw-h323h323#call-signaling-port
Istration
Setting the connect timeout
Nal gateway
Nodecfg#debug gateway h323 tpktchan
Nodecfg#debug gateway h323 error
Nodecfg#debug gateway h323 signaling
H323 status detail level
Context SIP gateway overview
Routing Architecture
Creating a context SIP gateway
Enter configuration mode
Context SIP Gateway configuration task list
From-URI-Host equal Remote Request-URI-Host equal Local
Configuring the IP binding
Mode Context SIP Gateway
Mode Transport Interface
Creating a transport interface
Enabling/disabling the context SIP gateway
Binding location services
Configuring a spoofed contact address
Node#show context sip-gateway gw
Troubleshooting
Debug commands
Show status information
Example
Configuration Examples
Outbound Authentication
Inbound Authentication
Outbound Registration
569
Inbound Registration
B2B User Agent with Registered Clients
572
VoIP profile configuration
VoIP profile configuration
Nodepf-voip name#
VoIP profile configuration task list
Creating a VoIP profile
Nodecfg#profile voip name
Configure codecs
Procedure Insert a codec at a specific position in the list
Mode Profile VoIP
Procedure Remove a codec from the list Mode Profile VoIP
Configuring the Cisco versions of the G.726 codecs
Mode VoIP name
Configuring the transparent-clearmode codec
Nodepf-voip pf-name#dtmf-relay
Defaultrtpsignaling
Configuring Dtmf relay
Configuring RTP payload types
Nodepf-voip name#rtp payload-type nse
Configuring RTP payload type for transparent-clearmode
Configuring RTP payload type for Cisco NSE
Configuring Cisco NSE for Fax
Jitter and dejitter buffer
Configuring the dejitter buffer advanced
Adaptive
Procedure Configure the dejitter buffer
Is valid for all modes
Max-delay
Dejitter buffer is allowed to introduce. This setting
Enabling/disabling filters advanced
Illustrates the difference between Fax relay and Fax bypass
Configuring Fax transmission
Fax relay and Fax bypass
Nodepf-voipname# fax transmis
Nodepf-voipname#fax transmis
Sion bypass g711alaw64k
Nodepf-voipname#fax dejitter
Retransmission number
Mode profile voip profile-name
Volume
CED retransmission
Fax bypass method
No-Signal Retransmission
Mode profile voip pf-name
Method default v150-vbdnse Default default
Mission bypass g711alaw64k
Modem bypass method
Configuring modem transmission
Nodepf-voip name#modem trans
Configuring IP-IP codec negotiation
Configuring the traffic class for Voice and Fax data
Home office in an enterprise network
Home office in an enterprise network
Description
Home office with fax
Show the configured profile
Soft phone client gateway
595
Disable Dtmf relay Show the configured profile
Pstn profile configuration
Creating a Pstn profile
Pstn profile configuration task list
Configuring output gain
Configuring the echo canceller
Procedure Disable echo cancellation Mode Profile Pstn
Procedure Configure voice output gain
600
SIP profile configuration
Namecfg#no profile name name
Entering the configuration mode for a SIP profile
SIP profile configuration task list
Mapping from a SIP disconnect cause
Q931-cause to sip-cause
Mapping to a SIP cause
Mapping from a SIP redirection reason
Mapping to a SIP redirection code
Authentication Service
Creating an Authentication Service
Authentication Service configuration task list
Creating credentials
Configuring the authentication protocol
Configuring a Realm
Location Service
Domain Examples
Location Service configuration task list
Creating a Location Service
Adding a domain
Creating an identity
Mode Identity
Bound
Authentication outbound face
Alias
Nodeauthout#authenticate index
Mode Authentication outbound
Authentication inbound face
Nodeauthout#authenticate authentica
Nodeauthin#no authenticate index
Mode Authentication inbound
Nodeauthin#authenticate authentica
Nodeauthin#authenticate index
Registration outbound face
Mode Registration outbound
Noderegout#proxy index down posi
Noderegout#proxy host port
Strict-route
Port strict-route
Inbound
Noderegin# no lifetime default sec
Registration inbound face
Nodeidentityname# no registration
Nodecallout#proxy index host
Mode Call outbound
Call outbound face
Nodecallout#proxy host port
Call inbound face
Mode Call outbound
Mode Call inbound
Inheriting from an identity group to an identity
Creating an identity group
Subscription
Configuring the Message Waiting Indication feature for SIP
Notification
Mode Message inbound
Mode Message inbound
Message Waiting Indication through Call-Control
This configuration example, inheritance is used
VoIP debugging
Debugging strategy
Example Verify IP connectivity
Following command will disable the filter completely
Filtering debug monitor output
Verifying IP connectivity
Overview Isdn debug monitors
Debugging call signaling
Debugging Isdn signaling
Unit#debug ccisdn signaling
Verify an incoming call
Verify an outgoing call
Line
630
Debug isdn event slot port all layer2 layer3
Isdn layer 2 and 3 can be verified using a show command
Verify Isdn layer 2 and 3 status
For most verbose output
Debugging FXS Signaling
Overview FXS debug monitors
Stops
State to RINGING, that means it has accepted the call
Overview H.323 debug monitors
Debugging H.323 Signaling
635
636
637
Debugging SIP signaling
Using SmartWare’s internal call generator
Way control detail level
Debugging voice data
No debug media-gate
Way dejitter
Way dsp
Way switch
Way error
Way rtp
Check system logs
How to submit trouble reports to Patton
643
Appendix a Terms and definitions
Also release
SmartWare architecture terms and definitions
Pression
Buffer
Ory
Pots
Tftp
Appendix B Mode summary
Mode overview, 1
Mode Overview, 2
Mode Overview, 3
Appendix C Command summary
Ebnf syntax
Show help
New Configuration Commands
Show command history
Other
Appendix D Internetworking terms & acronyms
Numeric
Abbreviations
DSS1
MSN
SAR
Appendix E Used IP ports & available voice Codecs
Webserver
Used IP ports
Telnet
Available voice codecs