Infeed
1.2 Smart Infeed
Note
Under the condition that the drive system was commissioned with STARTER and no PROFIdrive telegram was activated, the infeed can be
Switching off the Smart Line Module
To switch off the Active Line Module, carry out the steps for switching it on in reverse order.
Switching off the controller with the OFF1 signal is delayed by the time entered in p3490. This allows the attached drives to be braked in a controlled manner.
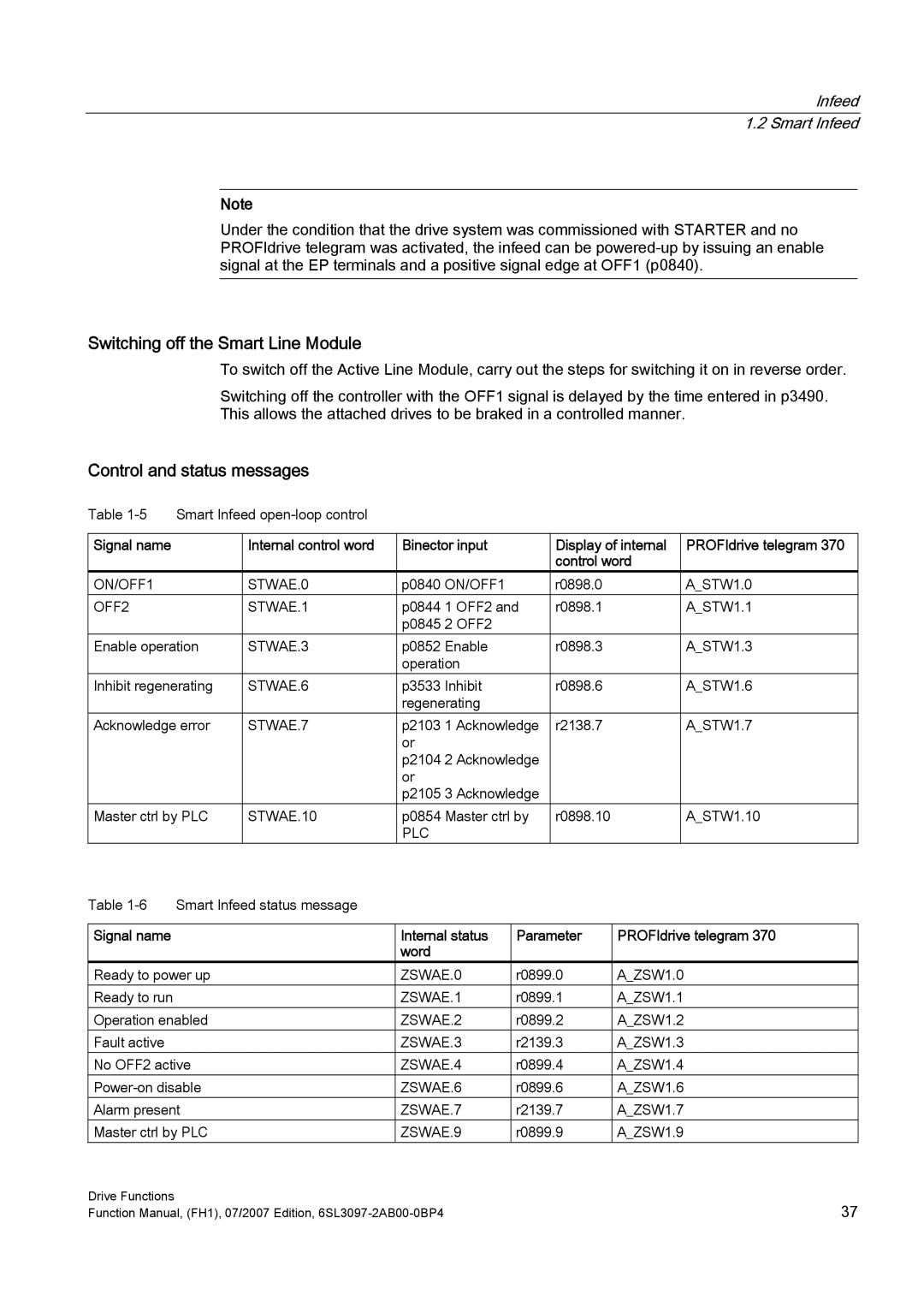
Control and status messages
Table | Smart Infeed |
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |
Signal name |
| Internal control word | Binector input |
| Display of internal | PROFIdrive telegram 370 | ||
|
|
|
|
|
| control word |
| |
ON/OFF1 |
| STWAE.0 | p0840 ON/OFF1 |
| r0898.0 |
| A_STW1.0 | |
OFF2 |
| STWAE.1 | p0844 | 1 OFF2 and | r0898.1 |
| A_STW1.1 | |
|
|
| p0845 | 2 OFF2 |
|
|
|
|
Enable operation | STWAE.3 | p0852 | Enable |
| r0898.3 |
| A_STW1.3 | |
|
|
| operation |
|
|
|
| |
Inhibit regenerating | STWAE.6 | p3533 | Inhibit |
| r0898.6 |
| A_STW1.6 | |
|
|
| regenerating |
|
|
|
| |
Acknowledge error | STWAE.7 | p2103 | 1 Acknowledge | r2138.7 |
| A_STW1.7 | ||
|
|
| or |
|
|
|
|
|
|
|
| p2104 | 2 Acknowledge |
|
|
| |
|
|
| or |
|
|
|
|
|
|
|
| p2105 | 3 Acknowledge |
|
|
| |
Master ctrl by PLC | STWAE.10 | p0854 | Master ctrl by | r0898.10 |
| A_STW1.10 | ||
|
|
| PLC |
|
|
|
|
|
Table | Smart Infeed status message |
|
|
|
|
|
| |
|
|
|
|
|
| |||
Signal name |
|
| Internal status | Parameter | PROFIdrive telegram 370 | |||
|
|
| word |
|
|
|
|
|
Ready to power up |
| ZSWAE.0 | r0899.0 | A_ZSW1.0 | ||||
Ready to run |
|
| ZSWAE.1 | r0899.1 | A_ZSW1.1 | |||
Operation enabled |
| ZSWAE.2 | r0899.2 | A_ZSW1.2 | ||||
Fault active |
|
| ZSWAE.3 | r2139.3 | A_ZSW1.3 | |||
No OFF2 active |
| ZSWAE.4 | r0899.4 | A_ZSW1.4 | ||||
| ZSWAE.6 | r0899.6 | A_ZSW1.6 | |||||
Alarm present |
| ZSWAE.7 | r2139.7 | A_ZSW1.7 | ||||
Master ctrl by PLC |
| ZSWAE.9 | r0899.9 | A_ZSW1.9 | ||||
Drive Functions | 37 |
Function Manual, (FH1), 07/2007 Edition, |