Hyundai Robot Hi4
Page
Head Office JEONHA-DONG, DONG-GU
Contents
2.2
Basic things for step
Condition setting
Application condition
Setting the field bus
Machine
R17
Palletizing pattern register Pallete dip angle measurement
R10
R18
R137
R123
R136
R138
Menu tree
11.4.3
11.4.1
11.4.2
Contents
Panel, Teach pendant
Safety
General
Safety, Operation Panel, Teach Pendant 1 Safety
Invalid environments
Safety Marking
Relevant Safety Standards
Safety Training
Mandatory
Speed Limitation Function-ISO 10218EN 775
Safety Stop Function-ISO 10218EN 775
Operation Mode Selection- ANSI/RIA R15.06-1999
Working Envelope Restriction- ANSI/RIA R15.06-1999
Installation of Robot
Safety Fence
Safety, Operation Panel, Teach Pendant 1 Safety
Safety, Operation Panel, Teach Pendant 1 Safety
Robot installation
General Safety Precautions
Technical Safety Precautions
Safety, Operation Panel, Teach Pendant 1 Safety
Space for robot installation
Safety Working Procedures
Safety measure for robot operation
Safety, Operation Panel, Teach Pendant 1 Safety
Interlock
Safety Measure for Robot Try-out
Safety, Operation Panel, Teach Pendant 1 Safety
Safety Measures for Entering Inside the Safety Fence
Safety Measures for Maintenance and Repair
Position
Safety, Operation Panel, Teach Pendant 1 Safety
Necessary Actions after Completion of Maintenance and Repair
Safety Functions
Safety Control Chain of Operation
Safety Chain of Operation
Emergency Stop
Status of Emergency stop
Operating Speed
Safety Related to End Effectors
Gripper
Tools and Workpiece
Liabilities
Safety, Operation Panel, Teach Pendant 1 Safety
Motor on
Error
Operation Panel
Emergency Stop
Please refer to the following table
Stop
AUTO/MANUAL
Teach Pendant
External Shape of Teach Pendant
Weavon WEV#=1 Arcon ASF#=1
Screen of Teach Pendant
Move
Arcof AEF#=1 Weavof
Conti / JOG on
Coord
AUX Axis
ACC / Intp
ESC
Right position of Title Frame
Shiftfast
Speed
LCD
SETYes
PROG/STEP
Ch/Var/Fn/CMD
STOP/MANOUT
Basic operation
Power OFF/ Motor OFF
Basic operation
Select the type of robot connected controller
How to initiate the system
Teaching
Step and Function
PNo999* S/F1/0 Spd100.00
Parameter of Step command line
Basic things for step
Select PF menu
Interpolation locus from between Step and Step
Pose
= Robot coordinate system E = Encoder
Tool number
Speed
Accuracy
Output option
Stop condition
Stop state variable
143938 *** Step Pose Data *** A0 S4
When the coordinate system is set as encoder
Step position validation/modification method
Coordination Base,Robot,Encoder
Select and Enter number. Press SET
When the coordinate system is set as Base or Robot
000
Step
50.000
Coordinate system
JOG operation key
Xis C o o rd
Axis coordinate
B o t C o o rd
Robot coordinate
Axis direction Rotation direction
Rzu
User coordinate
Tool coordinate
It shows that the robot is operating without tool
Program No. = Step No. = Tool No. =
Auto tool setting
143938 ***AUTO Tool SETg*** A0 S4
Select and Enter number. Press SET Execute
Service Menu
Protect Storage media format Save/Load Sram Card
Service Menu
Use Number/UpDown and press SET Previous Next
11 DIO169
Monitoring
143938 *** Monitoring *** A0 S4 Monitor OFF
Equalizerless GUN data
Enter the number of line and press SET
Command Angle
Current Command Angle
PN100* S/F=4/0 Sp100.00
Service
143938 *** M a N U a L A0 S4
Mspr on
PN100* S/F=4/0 Sp100.00 RobotH120, 6axes
Break Slip Count Outline
Slip count reset
Slip Count display/setting Outline
Use Number/UpDown and press SET
Clear to slip count?
CS=
CP=
CR=
143938 *** M a N U a L
Servo GUN Data Outline
OFF
Palletize Register Outline
Work State
Counter
OFF
Shift buffer
Register
Register
Select and Enter number. Press SET
XYZ Shift Register
Register A0 S4
Complete
Service menu
Shift buffers
Reference Parallel movement shift
Work작업A물Awork작업물a a
On-line shift register Group
Register A0 S4 ON-line shift register
Service menu
Palletizing register
Register A0 S4 Palletizing register
Start count
# Palletizing preset
Pallet No
Input the palletize pallet number.1-16
Frequency condition register
Select and Enter number. Press SET End
Select Enter Number. Press SET
Conveyor Data
Register
Conveyor data clear. Continue? YES/NO
Works entered the CV line =
Previous Next Index
Variable
Index
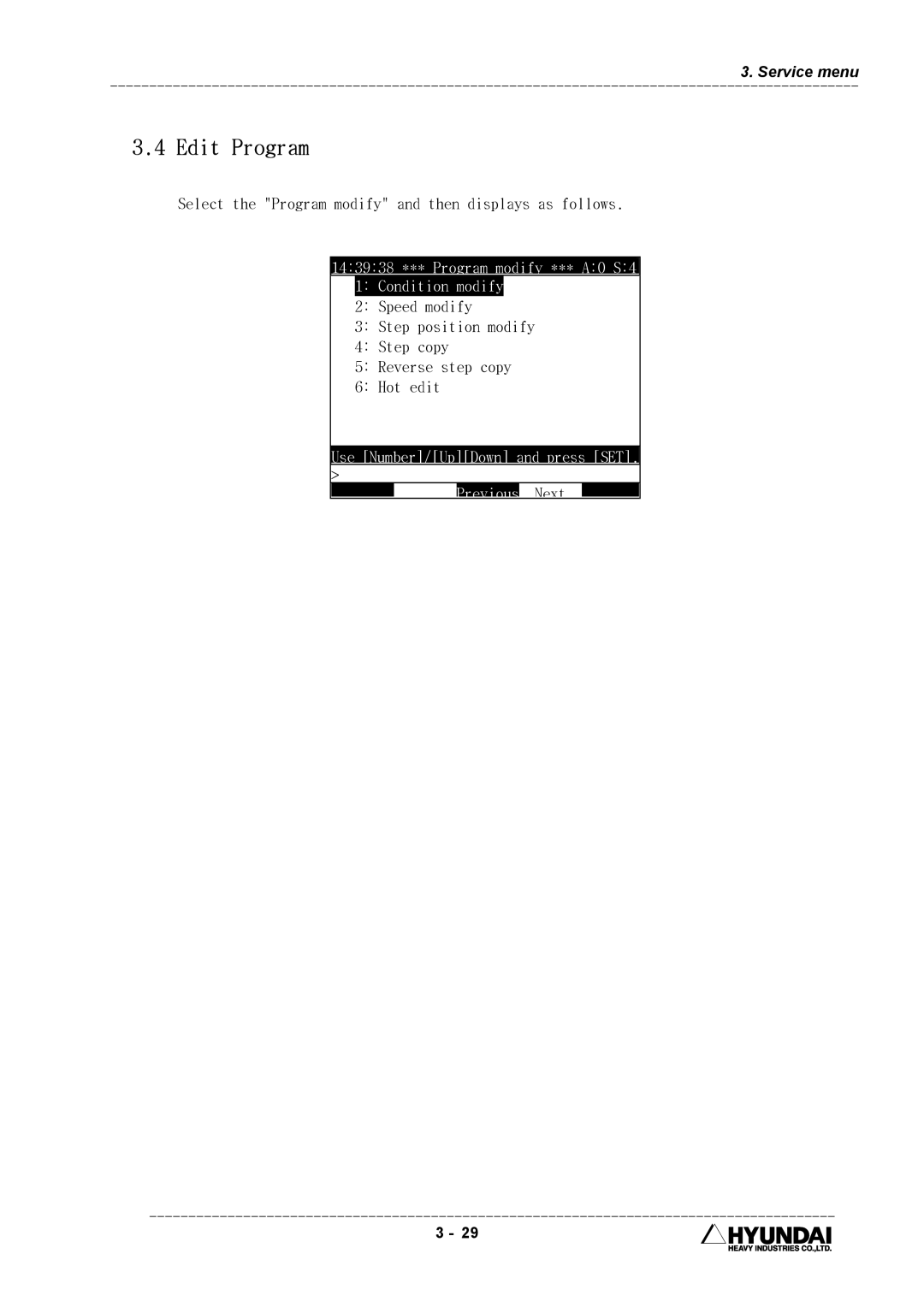
143938 *** Program modify *** A0 S4 Condition modify
Edit Program
Select the Program modify and then displays as follows
Modify writing condition totally
MX2
Modify speed in record totally
143938** Speed Modification **A0 S4
Modify position in record totally
143938 ** Position modify ** A0 S4
T1= Deg R2=
Is shifted
T1= Deg
T1= Deg R1=
Step Copy
Step Copy
Service menu
Step Reverse-Copy
143938 * Reverse step copy * A0 S4
Service menu
Edit program in running Hot Edit
Not running state. Use Manual mode.ESC
HotE022/3/1 PB022/4/0
Apply
Applying initiated CALLing info Escape
Service System
Apply hot edit, First ?
143938 *** Hotedit *** A0 S4
SR100% HotE022/3/1* PB022/4/0 S1 Move P,S=30%,A=1,T=0
Hot eidt A0 S4
Delete
File Management
Copy
Protect
File display A0 S4
Internal memory file name
All files? Yes, or just programs? No
File, 31351 Block free
Program first data
PN100* S/F4/0
File, 63156 block free. Page 1
Internal program axis no
143938 *** Number of axes *** A0 S4 Internal memory
Previous Next Escape
Internal memory
Rename
Rename
143938 *** RenameRAM *** A0 S4 H120 .991 31 2001-07-09
143938 *** RenameRAM *** A0 S4 H120 .991 31 2001-07-09
143938 *** RenameRAM *** A0 S4 H120 *991 31 2001-07-09
Enter new No and press SET
File, 31351 Block free. Page 1
H120 *995 31 2001-07-09
Use PF Key and select
143938 *** RenameRAM *** A0 S4
Service menu
H120
Copy
Copy
Robot
Select Cancel Previous Next Excute
H120 991
Delete
Delete
H120 .991 Delete? YesAll=1/No
Protect
Protect
Protect or Release?1Protect/Release
Reference
Press executePF5 or ESC key
Storage Media Format
143938 ** Sram Card Format ** A0 S4
Next
Save/Load Sram Card
Load all files from the Sram card
143938* Save/load all files * A0 S4 DIR
Folder, 1999 KB free. Page 1
Enter the name if a folder to read.Any
143938* Save/load all files * A0 S4
Previous Next Select
Mirror Image Off-Line XYZ shift
Program Conversion
143938 *** Conversion
Coordinate transformation
Program Destination program
Contents of window
Object program
Mirror Image
Enbl
Enter number and press SET Execute
Service menu
Off-Line XYZ Shift
Example Parallel transfer of the workpiece
143938 * Off-Line XYZ Shift * A0 S4
Enter number and press SET
143938 *** System checking *** A0 S4
System Checking
Following is displayed in system checking menu
Press ESC or R
System version
143938 *** System version *** A0 S4
Press ESC or R
Run time
Run time
Run time
=00 Total cycle count =0
Clear YES / no
Data is cleared as selecting YES and following is displayed
Diagnosis of troubles
Check
Service menu
143938 *** Error Log no *** A0 S4
Error logging
143938 *** Error logging *** A0 S4 0005 25
Refresh?
YES/NO
Use UpDown Press SET
Stop History
143938 *** Stop Logging *** A0 S4 01 25
Service menu
Press PF3, PF4, ESC or R
Operation History
143938 ** Operation Hist ** A0 S4
Refresh? Previous Next
Date = Time =
Date setting Date, Time
143938 *** Date/Time set *** A0 S4
Select and Enter number, Press SET
Chap 4 Condition Setting
Modification method
143938 *** Condition set *** A0 S4
Press SHIFT+-- Key AppliCnd End
Step go/back max. speed
Service
Cycle type
Playback
Function in step go/back
Speed rate
Record speed type
Select PF menu Service System
Robot lock
N U a L
Crd01
Interpolation base
User Coordinate
=100%,A=0,T=1
→ 12. Coordinate setting → 1. User coordinate
Chapter Application condition
Conveyor Oper=Normal,Simulat.,Test Search range
Cond Set PF5, Press AppliCnd PF1 Screen display
143938* Application Condition A0 S4
Press SHIFT+-- Key Cond Set
RobotH120, 6axes Steps
Conveyor operation
T O
Search reference position record
Service Rel Wait
Search Range
Move P S=100% A=0 T=1
RobotH120, 6 axes Steps
Spot welding
PN100* S/F4/0
143938
Service Rel Wait Cond Set
Gun Search reference point record
G1 SW Wd-On
OutputDO signal clear
On-line Shift Register Clear
System setting
System setting
Spot welding datacondition,sequence Equalizing parameter
Palletizing pattern register Palette dip angle measurement
System setting
143938 *** System setting *** A0 S4 User parameter
Press SHIFT+-- Key
User configuration
143938 * User configuration * A0 S4
Next End
Display language
Pose Record Type
Start type
Change of cursor position in Auto mode
Service Rel.WAIT
Wait DI/WI Forcible Release
Confirm when the command delete
DeleteYes/No? Service System
External Program selection
Power failure Detection Not Changeable
Dettachment of Teach Pendant
Using the program strobe signal
Value of Prog Selec Sig input is Service System
Step SET Alarm Type
Lowest position proportion of the cursor
Using the collision sensor
Coordinate setting Use Number/UpDown and press SET
Controller Parameter
Input/Output signal selection
143938** DIO signal setting ** A0 S4 Input signal logic
DI9
Previous
143938*** do signal logic
DO9
143938 ** do Sig attribute ** A0 S4
DO1 DO2 DO3 DO4 DO5 DO6 DO7 DO8 DO9
143938 *** Pulse table
Enter number. Press
143938 *** Delay table
MXUnfolding Sig = X1
143938 ** DI Sig assignment ** A0 S4
External reset
Monitoring
External start External stop
B05
BO1
BO3
B07
High do
Setting the Earlier output Outline
Sig Time
Sec Low GO High
„ Resister the name of in/output signal
DIO name
Press SET for string input
143938 ** Character input ** A0 S4
Use UpDown, and press SET Complete
File not exist, Create file? YES/NO Done
Done
143938* En/Disable Fieldbus * A0 S4
SHIFT+-- to En/Disable
DI1 DI8
DI9
DI9
143938 *** Assign Input No *** A0 S4
DI1
Previous Next Done
143938*** Assign Outpur No *** A0 S4
Form Previous
Teach Pendant Cntp Outline
Serial port
143938 * Serial port select* A0 S4 Teach Pendant Cntp
Cant modify! Private port for T/P.ESE Previous Next
143938 *** Serial to I/O *** A0 S4
External computer and visa versa
Interface with the external vision system
Auto
Robot Ready
Ready
Enter number and press SET Previous Next Complete
143938 *** Home position *** A0 S4
Home position registration
Actual screen
Home 1 Program No. = Step No. =
Press SHIFT+
Return to the previous position
143938 ** Previous position ** A0 S4
Sec
End Relay Output Time
Relay
143938 *** Interlock Abn.*** A0 S4
Interlock error time
Interlock error timer = 60 sec
External error output
143938 *** Error output *** A0 S4
Signal name Assignment and Quantity Type
System setting
Press SHIFT+-- Key
Power Saving PWM OFF
12.8
Shift Limit
200.0
Setting the user key
GUN2
Select and Enter number. Press SET Previous Next Complete
143938 *** f-key setting *** A0 S4
F2= F3= 0 f4= 527
143938 *Coordinate assignment* A0 S4 User coordinate
Procedure
Coordination system registration
Stationary tool coordinate
143938 *** User coordinate *** A0 S4
Staionary tool X1=
143938 *** Staionary tool *** A0 S4
Staionary tool
Staionary tool X2=
Machine Parameter
143938 ** Machine parameter ** A0 S4 Tool data
Component
Tool Weight
Tool Data
IzZf
Reference ⑴ Auto calibration Outline
143938 ***AUTO Tool SETg*** A0S4
HH : Body Torch
Adjust angle by jogging, then push PF5 Execute
143938 ***TOOL Angle SETg*** A0S4
==H Side
90.0
Axis Constant
143938 *** Axis constants *** A0 S4
Use UpDown Key and press SET
Use UpDown Key and press SET Previous Next
Soft Limit
143938 *** Software limit *** A0 S4
143938 ** ARM interference ** A0 S4
Arm Interference Angle
Outline It sets the working limit between the ARM
Min = 25.0 Max =
Encoder calibrationData input
Encoder Offset Calibration
Outline It calibrates the original point of encoder
R2= R1=
After axis Oper, press REC.ESCusable
143938 *** Encoder offset *** A0 S4
2000000000
Outline It sets acceleration/deceleration time
Contents of the screen „ Maximum speed
Acceleration/Deceleration Speed Parameter
117
Axis Dead Zone
143938 ** B axis dead zone ** A0 S4
Level
Level = 0 ∼
Accuracy
Distance
Cornering
Discontinuous step Continuous step
Speeds
Inertia 00Kgm2 Center
Contents of the screen
Additional load per each axis
Inertia
System setting
Arc Palletizing Conveyor Volt. output proportional to Speed
Application parameter
143938 *Application parameter* A0 S4 Spot & Stud
Spot & Stud
143938 *** Spot&Stud Weld *** A0 S4 Air-gun welding data
143938 *Air-gun welding data* A0 S4
System setting
Move tip clearance mm 10.0 Fix tip clearance mm
Second2 servo gun parameter
Case of selecting the next screen
Offset mm
150 225 300 350 Pressure-Current Tab.1 Gravitational
143938** Servo Gun 1 Param. ** A0 S4
Pressure-Current Tab.1 Gravitational
150 225 300 350
Check the abnormality of abrasion quantity
System setting
System setting
143938*Servo-gun Welding Data* A0 S4 Sequence common data
Welding condition Welding sequence Welding data copy
Common Data A0 S4
Number Output data Output type
Force 50Kgf
143938 *** Weld Sequence *** A0 S4
Number Condition signal
Squeeze signal
WI wait
Sequence
Source number
GUN2
Enter number and press SET 0.0
System setting
Shield Gas state
2 Arc
Arc Weld
Contents of the screen High step forward/backward setting
Inching speed setting
Palette slope calculation
Palletizing
143938 *** Palletizing *** A0 S4 Palletize pattern register
Use Number/UpDown and pressSET Previous Next
143938** Palletize pattern ** A0 S4 Pattern register
Pattern register
YES
Press SHIFT+-- Key Previous Next Complete
Basic pattern
System setting
Rec.PosiY Direct
Conveyor
Conveyor parameter setting
Conveyor
Conveyor angle/centr auto-set
Press SHIFT+-- Key Previous Next
143938** Conveyor Parameter ** A0 S4
Dsbl
System setting
System setting
Conveyor type
Automatic setting of the conveyor angle and center Outline
143938* Auto Conveyor Angle * A0 S4
12.0
Pin arrangement of analog output terminal
Speed proportion voltage output
12.0V ∼ +12.0V
143938 ** Speed by voltage ** A0 S4
Pin number Signal
Output
Port No
143938 *** System format *** A0 S4
Selecting type of the robot Positioner group setting
System format
System format
143938 *Robot type selection* A0 S4
Robot type selection
143938 *Robot type selection * A0 S4 H120 Matsushita motor
Enter number and press SET Previous Next
Cant delete! Check file protectionESC Previous Next
Make? Previous Next
No system file. Need to format first Previous Next
System setting
GUN 1 = 0 GUN 2 =
Use setting
143938 *** Usage setting *** A0 S4
ARC
Additional Axis
Positioner group setting
143938 ** Positioner Group ** A0 S4
Former times is ineffective
Automatic constant setting
Positioner Calibration
Max step position errorX =
Optimization of axis constant and tool length
System setting
143938*Positioner Calibration*A0 S4
You must setup the positioner GroupESC Previous Next
Positioner calibration
CP1 CP2
Constant is saved in the controller
DH.a= DH.alpha= DH.d= DH.theta=
143938*Positioner Calibration* A0 S4
000
Save?
Code
Set max. speed Step go/back
Enter R code No 0
Manual
R5,0
1 R0 Step Counter Reset
2 R5 External Start Selection ENABLE/DISABLE
R6,0
3 R6 External Program Selection ENABLE/DISABLE
Set Ext program selectionDSBL=0,ENBL=1
4 R10 RUN Time Display
Run Time Reset Outline All Data Clear
Run Time Clear
Clear YES / no
5 R17 File Name Display in Internal Memory
R18,0
6 R18 Frequency Condition Register DISPLAY/SETTING
Enter frequency register No 1
Enter register data 0
R29,0
7 R29 Tool Number Setting
Enter tool No
8 R44 Conveyor Data Clear
9 R45 Conveyor Register Manual Input
10 10 R46 Manual Conveyor Limit Switch on
Reference ⑴ It cannot be executed during operation
Enter speed rate 1
11 11 R49 Speed Variation Setting
PN999* S/F=3/1 Service
T O
12 12 R55 Palletize Counter Reset
End palletizing?
Rec speed type?Standard=0,%=1,mm/s=2
13 13 R71 Recorded Speed Specification Method Selection
Specify Sec
R71,0
143938 *** M a N U a L *** A0 SH4
14 14 R107 Program Head Data Display
15 15 R115 Program Copy
Use cursor Up/Down, then ESC for exit
Destination program to modify?
16 16 R116 Program Number Modification
Source program to modify?
R116,999
Delete?
17 17 R117 Program Delete
Program to delete?
Set robot lock DSBL=0,ENBL=1
18 18 R123 Robot Lock
Outline It sets the robot lock to ON/OFF
R123,0
Reference
19 19 R136 Modify Accuracy in Steps
„ If press
Enter MX No 1
Set MX signal Off=0, On=1
20 20 R137 Modify MX in Step
R137,0
R138,0
21 21 R138 Modify GUN in Step
Enter gun No
R138,1,0
23 23 R163 ON-LINE Shift Cancel
22 22 R162 Shift Register Value Change
Input binary WELDg condition 0
24 24 R204 Spot Welding Condition Manual Output
Input discrete welding condition 0
Enter gun number
26 26 R211 Squeeze Force Setting
25 25 R210 Servo GUN Number Selection
R210,1
Enter fix tip consumption. -10
27 27 R212 MOVING-TIP Consumption Preset
28 28 R213 FIXED-TIP Consumption Preset
R213,0.00
R219,1
30 30 R220 Equalizing Welder TIP Consumption Preset
29 29 R219 Equalizerless GUN Number Selection
R220,0.00
120
31 31 R245 Monitor Mode Selection
Monitoring
144 10 DIO145 168
Protect or Release?1Protect/2Release
32 32 R269 Memory Protection Setting
Program to protect?
Protect type?1Whole/2Section/3Playb
DSP2 S/W
33 33 R286 Software Version Display
DSP1 S/W
DSP3 S/W
R310,10
34 34 R310 Manual Output of GO-SIGNAL
Enter Group number 1
Input data to be output manually
R320,200
35 35 R320 SET MAX. Speed of Step GO/BACK
Step GO/BACK speed? 1 255mm/s
0DI Sig,1Analog,2Weld sticking0
Set reference point setting 0
36 36 R323 Robot Interrupt Function Record
R323
Enter reference Z -3000.0
Enter reference X -3000.0
Enter reference Y -3000.0
RobotH120, 6 axes, 1steps
M30,1
Example
Input minimum voltage. -10.0
M30=1,-5.00,5.00
Move P,S=100%,A=0,H=1
M30=1,-5.00,5.00,1
M30=1,-5.00,5.00,1,200.0,150.0
Reference ⑴ It can not be executed during operation
Backup execution code of controller?Y/N
37 37 R341 Execution Code BACK-UP
Programming
Programming
Modification of Step
Edit Step
Record of Step
Delete of Step
Summary of Operation Keys
Word Cursor Status
EN+PSTEP
Edition Screen
Edit Command
„ Command Area
„ Address Area
Example Move Sentence
Select interpolation type
Spd100.00
Command Input Select inputting command
Select command
RobotH6 6axes, 2steps
Enter index1-999
Enter pose
Local
Enter speed
Enter
P3+R2
Unit
Spd100.00 RobotH6
Adjust output optionToggle
Enter accuracy
2steps
To statement input status menu for sentence form constant
With numerical keys and menu
Sentence form
Pose form
Enter variable 120
Variable, numerical formula and string edit
Enter variable 120 Pose Shift Out
Enter variable
Enter variable V2%
SET
Unit Conv
ENABLE+Ö SET
‘ +-*/=&~,%!$?`. @#₩ Smm/sec=V1%/2
Weld
‘ Abcdefghijklmnopqrstuvwxyz
‘ abc efghkjklmnopqrstuvwxyz ‘ +-*/=&~,%!$?`.@#₩
Line number is reflected on the edit frame
Line number edit
SET
Goto S2
Block edit
Welding
Set start position of block region
Position of block region
V11!=0 S1 Move L,P1+R2,S=120mm/s,A=0,H=0
S2 Move L S=100mm/sec,A=0,H=0
Select block edit function
Copy Copied area is pasted just below a cursor
PN999* S/F1/2 Sp100.00 RobotH6 , 6axes, 14steps V10!=0
Select block edit function Unselect Copy Move Delete Close
PN999* S/F1/3 Sp100.00 RobotH6 , 6axes, 14steps V10!=0
Quick Open Function
Function Summary
Outline
Instructi
Remark
840.000 mm
Move step position
Pose of Current Step
960.000 mm
Save
Welding Start Condition EXE. AT ASF#=x
143938** Arc Condition File **A0 S4
Quick Open Function
Welding END Condition EXE. AT AEF#=
Condition File
Quick Open Function
ARC Auxiliary Condition File
Welding Auxiliary Condition Retry
143938** Arc Condition File **A0 S4
ASF
It starts with the current value of welding start condition
Retry
Welding Auxiliary Condition Restart
ARC Auxiliary Condition File Restart
Quick Open Function
Quick Open Function
Delay 30 sec
Welding Auxiliary Condition AUTO. Wire Stick Release
Auto Stick Recovery
20.0
Weaving Condition File
Select and Enter number. Press SET Previous Next Save
Quick Open Function
=30%,A=1,T=0
Program Edit in Running
HotE022/3/1
Select PF menu Escape Apply OK
143938*Servo-gun Welding Data*A0 S4 Welding condition
Spot Welding Function
Welding condition
Use Number/UpDownand press SET
Welding sequence
End wait time =0.00
Menu Tree
Chap Menu Tree
Menu List
Move, I/O
Grammar Input input direction , variable ,timeout time
Flow control
Endif
Jumpcall
REM Commemt
10.4 ETC
10.5 ARC
=voltage output valueVP=voltage ratio ,T=time ,ANTSTK
=100
Substitutional Statement
11.1.3
11.1.1
11.1.2
11.1.4
Execution setting
Signal input/output Jump, call, stop
DI1 signal output
M44 GI3 group signal output On-line shift M53
Character
Basic elements
Line
Address
∼&HFFFFFFFF
Constant
H0 ∼&HFFFF
S180 Flip Front
Robot type information
∼7 bit Bit Base R2180
Down Rear Auto
Variable
Global variable
Local variable
Input/output variable
System variable
RN1~RN16
Bit 1 start limit switchactive high
RN1~16
$CONVREG
Not Or XOR
Operator
Formula
V2$= Emergency Stop
Command line
Substitution
Robot Control Move Command
Until
Smove Command
∼3 0 is most accurate Tool
11.2.3 I/O 11.2.3.1 I/O Substitution
Print Command
Print #0, Signal Value =
#1 Serial port COM1 #2 Serial port COM2 Parameter
Input Command
Input #0 Teach Pendant
Arithmetic Variable, String variable
Program Flow Control Goto Command
Gosub ∼ Return Command
Delay Command
Call Command
11.2.4.5 on ∼GOTO Command
Wait Command
Stop Command
END Command
Stop If DI9=1 then
11.2.4.10 IF∼ELSEIF∼ELSE∼ENDIF Command
11.2.4.11 FOR∼NEXT Commands
Endif Print
Print Range Error END
Goto *RANGE
REM Spot Welding #1
ARC Welding Arcon Command
Comments
Arcon
Arcvol Command
Arcof Command
Arccur Command
Weavon Command
Arcdc Command
Arcdv Command
Weavof Command
Refp Command
Unsigned integer Number
Number of DI signal receiving interrupt
Print Command
Description Robot Interrupt I signal M29 Syntax
Others
Rinta Command
Parame Volt, interrupt occurs ∼10.0 Upper volt Ter
Spotcnd Command
Sreq Command
Sonl Command
Online coordinate conversion Slipping M53 Syntax
TONL1 Command
TONL2 Command
Number2,RF3=Basic Step number3 Start/End
Sreqt Command
Sxyz Command
SEA Command
Application of Search Dimension search
Teach Point Welding Line Search Range
Spot Command
Gunsea Command
No,TP=Insert sheet Program
Tierst Command
Call program to put in a insert sheet M94 Syntax
Palpu Command
PAL Command
Palend P=1, ES=81
Palend Command
Palrst Command
Callpr Command
Callpr
System Coordinate systems Number Example
Selcrd Command
∼10
Selcrd
M101 1,JOB Finished
MIT Code
ARC Welding
Function Arithmetic Function
Orderror
Timer
DEGRAD270
String Function
T Function Code
Spotcnd
T Function Code Example of corresponding HR Basic syntax
Palend P=1,ES=81
REM Spot Weld
Signal Connection
External Input Signal BD430/BD431
Plug-side 3M MDR 10140-3000VE HOOD10340-55F0-008
Use external power source
CNIN2 Input Signal
DI22/WI
General DI Signal DI1 ∼ DI18 signal connect as followings
Connect program selection signal as followings
Connect Discrete/Binary input signal as followings
※ Turn it on always
External Output Signal BD430, BD431
Output Circuit
BD430 Board Common voltage only
Connection Diagram BD431 Board Common + or voltage
Use external power source for power source
Set noise absorbing diode to a load
CNOUT2 Output signal
CNOUT2
GUN Signal
Reset
It is output when emergency stop is pressed
Step SET Alarm Signal
Control Parameter →
Error Time
Program ACK. Signal
Robot Running
It is out the confirming signal that robot is running
LOW Mode Signal
Control Parameter 4. Home Position Registration
Robot Ready Signal
Robot Home Signal
MDR
Specification of Connector
Maker Type Specification
20-Pin
Maker Type Specification