Configuration
Function Prompt |
| Selection or Range of Setting |
|
| Parameter | ||||
Lower Display |
|
| Upper Display |
|
| Definition | |||
English | Numeric |
|
| English | Numeric |
|
|
|
|
| Code |
|
|
| Code |
|
|
|
|
|
|
|
|
|
|
|
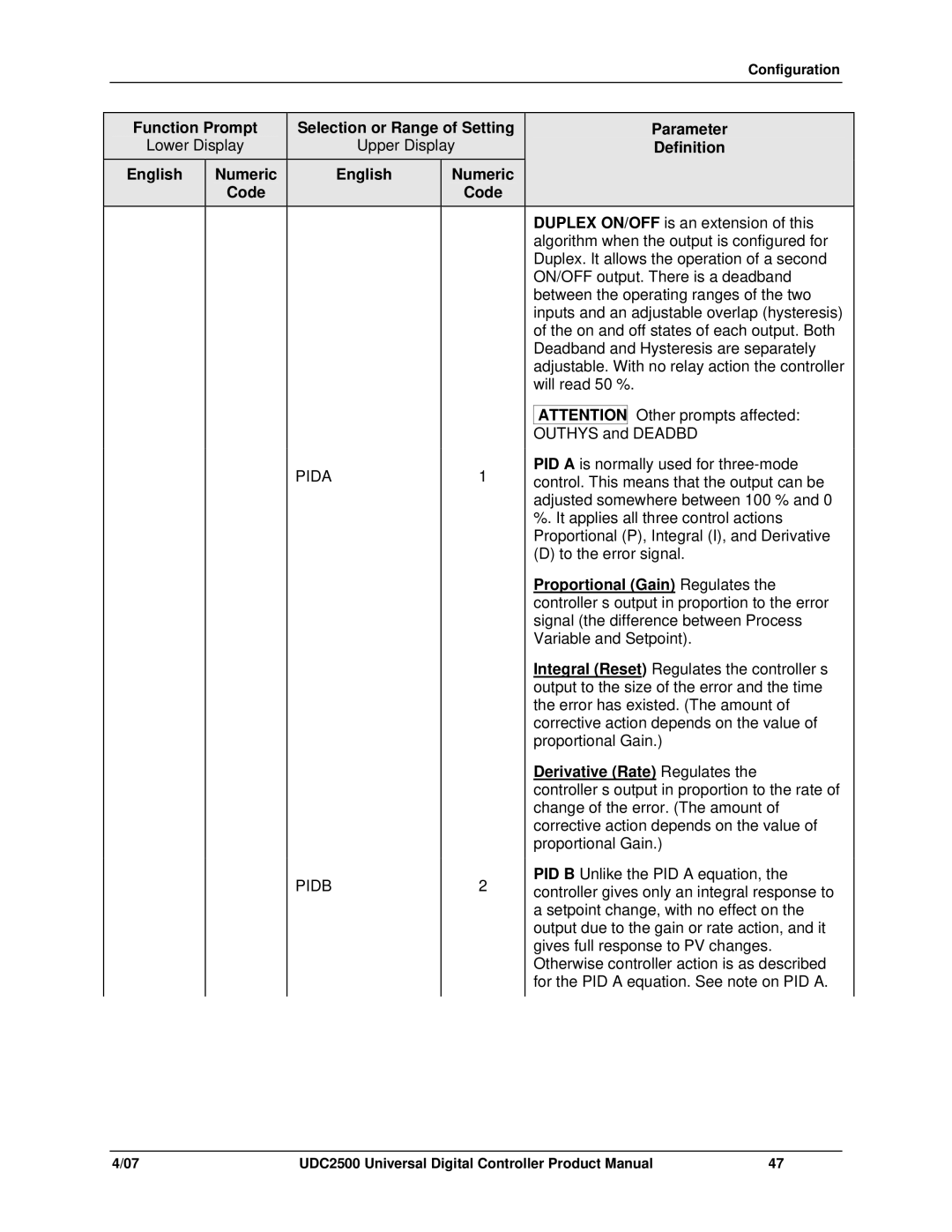
| DUPLEX ON/OFF is an extension of this | |
|
|
|
|
|
|
|
| algorithm when the output is configured for | |
|
|
|
|
|
|
|
| Duplex. It allows the operation of a second | |
|
|
|
|
|
|
|
| ON/OFF output. There is a deadband | |
|
|
|
|
|
|
|
| between the operating ranges of the two | |
|
|
|
|
|
|
|
| inputs and an adjustable overlap (hysteresis) | |
|
|
|
|
|
|
|
| of the on and off states of each output. Both | |
|
|
|
|
|
|
|
| Deadband and Hysteresis are separately | |
|
|
|
|
|
|
|
| adjustable. With no relay action the controller | |
|
|
|
|
|
|
|
| will read 50 %. | |
|
|
|
|
|
|
|
|
| Other prompts affected: |
|
|
|
|
|
|
|
| ATTENTION | |
|
|
|
|
|
|
|
| OUTHYS and | DEADBD |
|
|
| PIDA |
| 1 |
|
| PID A is normally used for | |
|
|
|
|
|
| control. This means that the output can be | |||
|
|
|
|
|
|
|
| adjusted somewhere between 100 % and 0 | |
|
|
|
|
|
|
|
| %. It applies all three control actions— | |
|
|
|
|
|
|
|
| Proportional (P), Integral (I), and Derivative | |
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| Proportional | |
|
|
|
|
|
|
|
| controller’s output in proportion to the error | |
|
|
|
|
|
|
|
| signal (the difference between Process | |
|
|
|
|
|
|
|
| Variable and Setpoint). | |
|
|
|
|
|
|
|
| Integral | |
|
|
|
|
|
|
|
| output to the size of the error and the time | |
|
|
|
|
|
|
|
| the error has existed. (The amount of | |
|
|
|
|
|
|
|
| corrective action depends on the value of | |
|
|
|
|
|
|
|
| proportional Gain.) | |
|
|
|
|
|
|
|
| Derivative | |
|
|
|
|
|
|
|
| controller’s output in proportion to the rate of | |
|
|
|
|
|
|
|
| change of the error. (The amount of | |
|
|
|
|
|
|
|
| corrective action depends on the value of | |
|
|
|
|
|
|
|
| proportional Gain.) | |
|
|
| PIDB |
| 2 |
|
| PID | |
|
|
|
|
|
| controller gives only an integral response to | |||
|
|
|
|
|
|
|
| a setpoint change, with no effect on the | |
|
|
|
|
|
|
|
| output due to the gain or rate action, and it | |
|
|
|
|
|
|
|
| gives full response to PV changes. | |
|
|
|
|
|
|
|
| Otherwise controller action is as described | |
|
|
|
|
|
|
|
| for the PID A equation. See note on PID A. | |
|
|
|
|
|
|
|
|
|
|
4/07 | UDC2500 Universal Digital Controller Product Manual | 47 |