LOCAL BUS CONTROL PLD DESCRIPTIONS
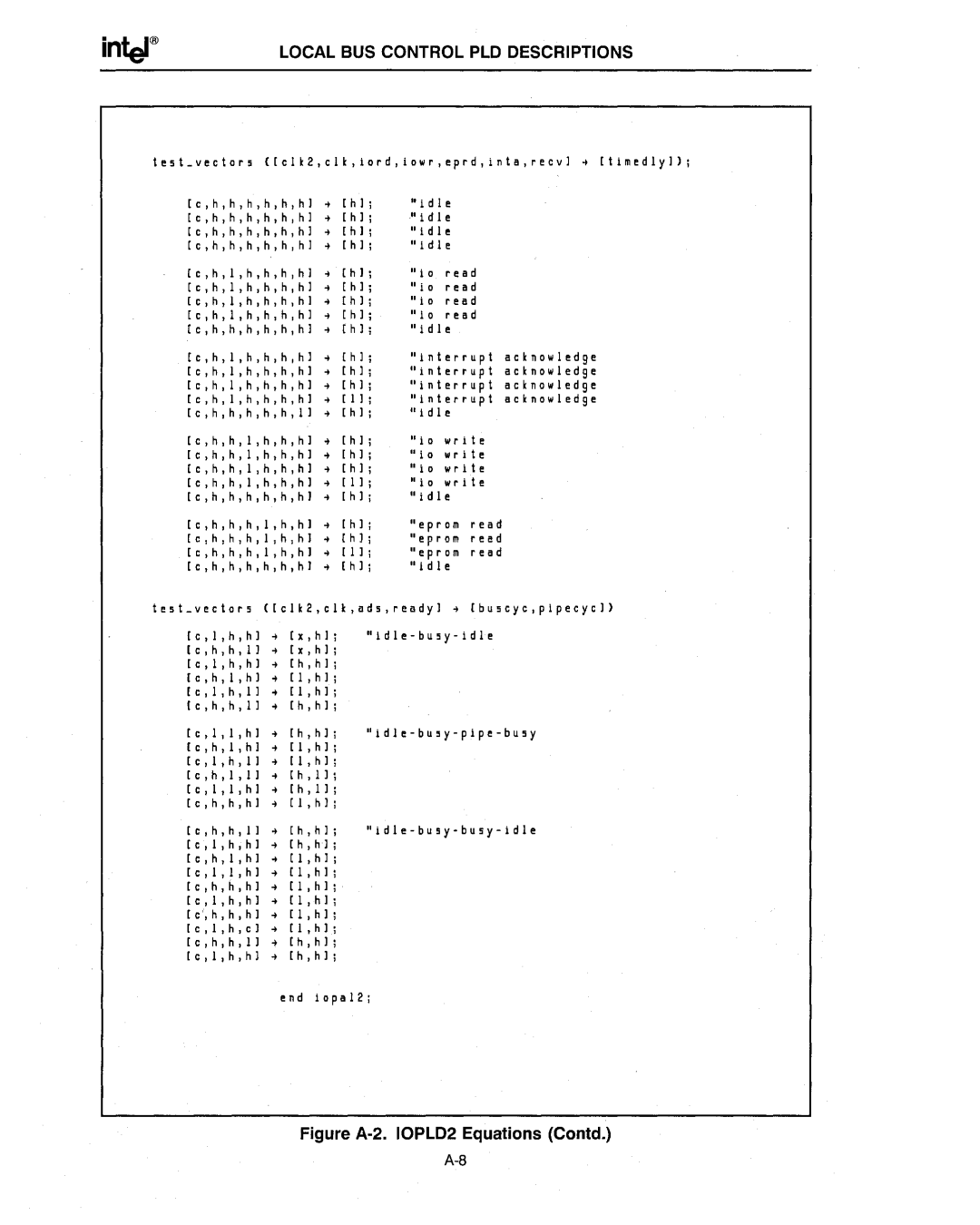
test - veeton ([clk2,clk,iord,lowr,eprd,inta,recvl ; [timedlyl);
[c,h,h,h,h,h,hl ; [h I ; [c,h,h,h,h,h,hl ; [h I;
[c,h,h,h,h,h,hl [h I ;
[c,h,h,h,h,h,hl [h I;
[c,h,l,h,h,h,hl ; [hi; [c,h,l,h,h,h,hl ; [hi; [c,h,l,h,h,h,hl; [hi; [c,h,l,h,h,h,hl ; [hi; [c,h,h,h,h,h,hl ; [hi;
[c,h,l,h,h,h,hl " [hi; [c,h,l,h,h,h,hl " [hi; [c,h,l,h,h,h,hl " [hi;
[e,h,l,h,h,h,h] ~ [11;
[c,h,h,h,h,h,11 " [hi;
[c,h,h,l,h,h,hl " [hi; [c,h,h,l,h,h,hl " [hi; [c,h,h,l,h,h,hl " [hi; [c,h,h,l,h,h,hl " [II; [c,h,h,h,h,h,hl " [hi;
[c,h,h,h,l,h,hl • [hi; [c,h,h,h,l,h,hl • [hi; [c,h,h,h,l,h,hl • [II; [c,h,h,h,h,h,hl • [hi;
.. i dIe
"I die
"I die
II i dIe
"10 read Ilia read Ilia read
"ia read
"I die
"Interrupt acknowledge "interrupt acknowledge "interrupt acknowledge "Interrupt acknowledge
"I die
.. i 0 \Pol r i t e
Ilia write
II i 0 \PI r i t e
.. i 0 \PI r i t e
.. i dIe
lIeprom read
"eprol!! read lIeprom read
"Idle
test - vecton ([clk2,clk,ods,readyl " [buscyc,plpecycll
[c,l,h,hl " [x,hl; "Idle - busy - idle [c,h,h,11 • [x,hl;
[c,l,h,hl " [h,hl; [c,h,l,hl " [I,hl; [ c , I , h ,II " [I , hi ; [c,h,h,11 • [h,hl;
[c,I,I,hl" [h,hl; [c,h,l,hl " [I,hl; [ c , I , h , I I " [I, hi; [c,h,I,I] " [h,ll;
[ c , I , I ,hi [ h , II ;
[c,h,h,h] [I,hl;
[c,h,h,ll" [h,hl; [ c , I , h , h] " [h, hi ; [c,h,l,hl" [I,hl; [ c , I , I , hi" [I, hi; [c,h,h,hl " [I,h]; [c,l,h,hl" [I,hl; [c',h,h,h] " [I,hl; [ c , 1 I h , c]
"idle
"Idle - busy - busy - idle
end lopal2;