MULTIBUS I AND Intel386 DX MICROPROCESSOR
82289 | 82289 |
RESET | RESET |
|
ALWA'fS/ClIQ[CK
| ":' |
|
|
|
|
| MODE 1 |
|
| MODE 2 |
|
| 82289 |
|
|
| 82289 |
RESET | RESET |
|
| RESET | RESET |
|
|
|
| 'Q |
|
|
| ~ | PARALLEL | D |
|
|
| I/D |
|
| |
|
| OR |
|
| |
| MODE 3 | ADDRESSABLE |
|
| |
| LATCH |
| MULTIBUS . BCLK | ||
|
| ENABLE . |
|
| |
|
|
|
| *WHEN LOW, 82289 IN MODE 3; |
|
|
|
|
| WHEN HIGH, 82289 IN MODE 2 |
|
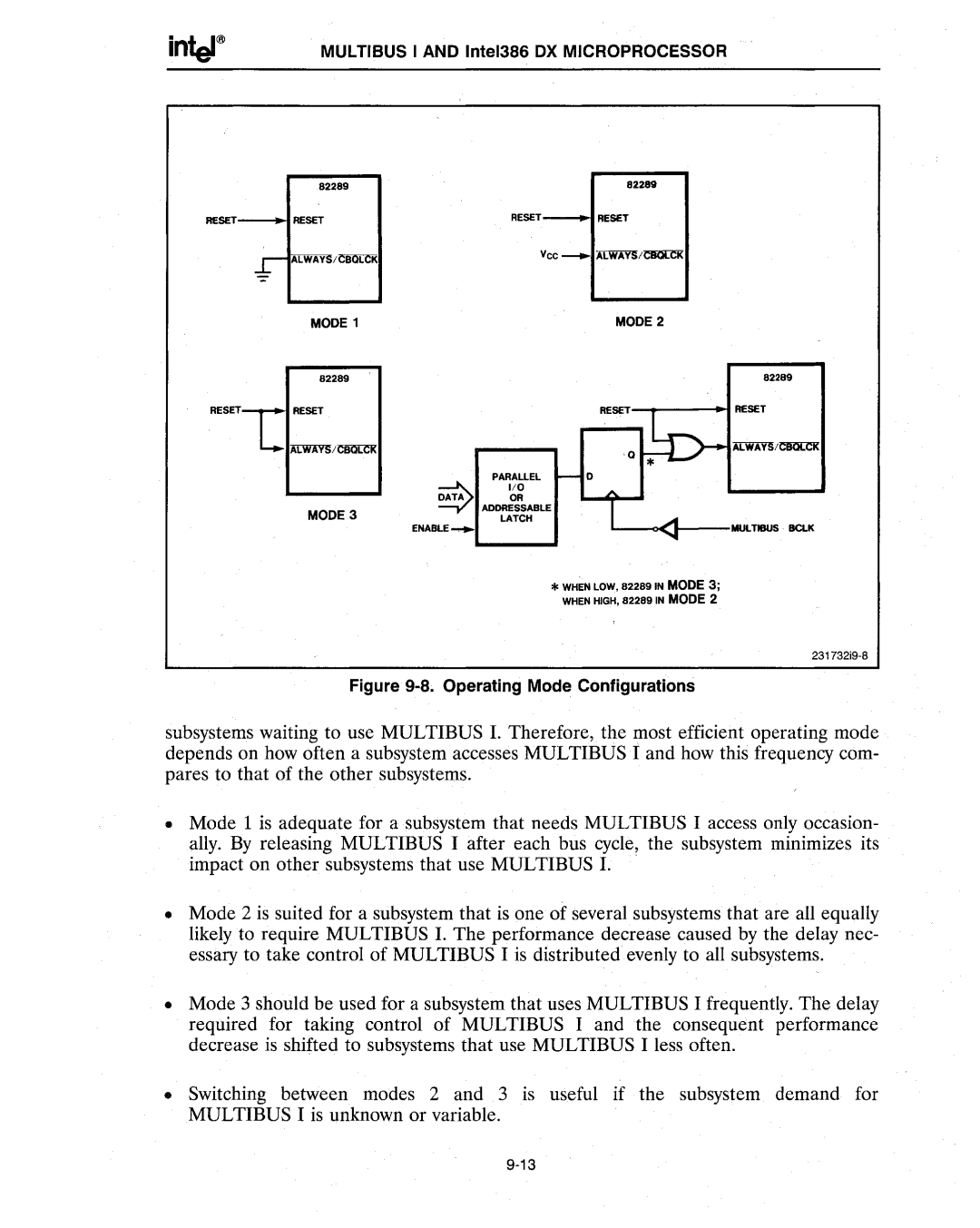
Figure 9-8. Operating Mode Configurations
subsystems waiting to use MULTIBUS I. Therefore, the most efficient operating mode depends on how often a subsystem accesses MULTIBUS I and how this frequency com- pares to that of the other subsystems.
•Mode 1 is adequate for a subsystem that needs MULTIBUS I access only occasion- ally. By releasing MULTIBUS I after each bus cycle, the subsystem minimizes its impact on other subsystems that use MULTIBUS I. .
•Mode 2 is suited for a subsystem that is one of several subsystems that are all equally likely to require MULTIBUS I. The performance decrease caused by the delay nec- essary to take control of MULTIBUS I is distributed .evenly to all subsystems.
•Mode 3 should be used for a subsystem that uses MULTIBUS I frequently. The delay required for taking control of MULTIBUS I and the consequent performance decrease is shifted to subsystems that use MULTIBUS I less often.
•Switching between modes 2 and 3 is useful if the subsystem demand for MULTIBUS I is unknown or variable.