Parameter Description | Issue 01/06 |
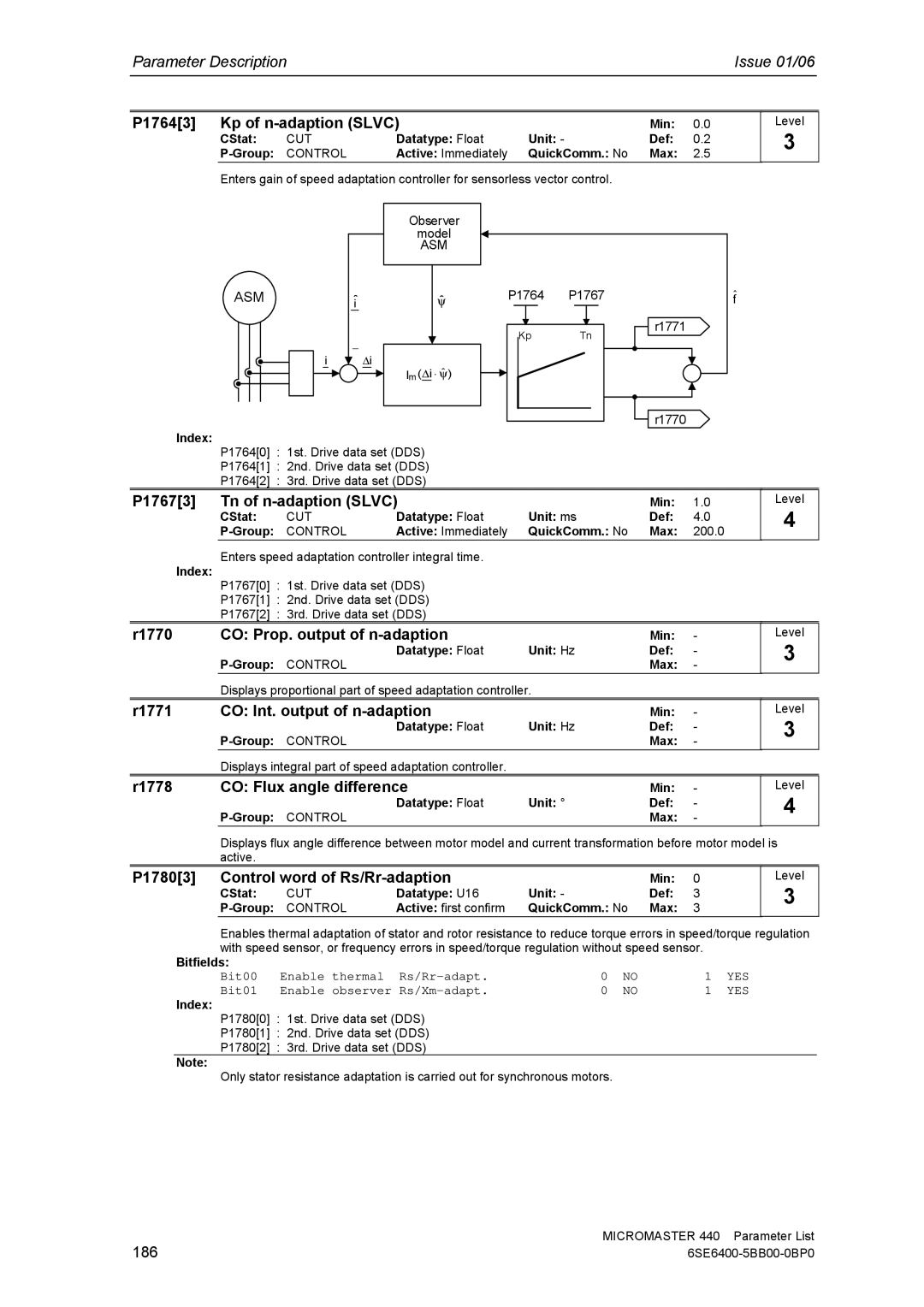
P1764[3] Kp of |
| Min: | 0.0 | ||
CStat: | CUT | Datatype: Float | Unit: - | Def: | 0.2 |
CONTROL | Active: Immediately | QuickComm.: No | Max: | 2.5 | |
Enters gain of speed adaptation controller for sensorless vector control.
Level
3
ASM
i
ˆi
−
∆ i
Observer |
|
|
|
model |
|
|
|
ASM |
|
|
|
ψˆ | P1764 | P1767 | fˆ |
| Kp | Tn | r1771 |
|
| ||
Im (∆ i ⋅ ψˆ ) |
|
|
|
|
|
| r1770 |
Index: |
|
P1764[0] | : 1st. Drive data set (DDS) |
P1764[1] | : 2nd. Drive data set (DDS) |
P1764[2] | : 3rd. Drive data set (DDS) |
P1767[3] Tn of |
| Min: | 1.0 | Level | ||||
|
| CStat: | CUT | Datatype: Float | Unit: ms | Def: | 4.0 | 4 |
|
|
| ||||||
|
| CONTROL | Active: Immediately | QuickComm.: No | Max: | 200.0 |
| |
|
| Enters speed adaptation controller integral time. |
|
|
|
| ||
| Index: |
|
|
|
|
|
| |
|
| P1767[0] | : 1st. Drive data set (DDS) |
|
|
|
| |
|
| P1767[1] | : 2nd. Drive data set (DDS) |
|
|
|
| |
|
| P1767[2] | : 3rd. Drive data set (DDS) |
|
|
|
| |
r1770 |
| CO: Prop. output of |
| Min: | - | Level | ||
|
|
|
| Datatype: Float | Unit: Hz | Def: | - | 3 |
|
| CONTROL |
|
| Max: | - |
| |
Displays proportional part of speed adaptation controller.
r1771 | CO: Int. output of |
| Min: | - |
| Datatype: Float | Unit: Hz | Def: | - |
|
| Max: | - |
Displays integral part of speed adaptation controller.
Level
3
r1778 | CO: Flux angle difference |
| Min: | - |
| Datatype: Float | Unit: ° | Def: | - |
|
| Max: | - |
Level
4
Displays flux angle difference between motor model and current transformation before motor model is active.
P1780[3] Control word of |
| Min: | 0 | ||
CStat: | CUT | Datatype: U16 | Unit: - | Def: | 3 |
CONTROL | Active: first confirm | QuickComm.: No | Max: | 3 | |
Level
3
Enables thermal adaptation of stator and rotor resistance to reduce torque errors in speed/torque regulation with speed sensor, or frequency errors in speed/torque regulation without speed sensor.
Bitfields: |
|
|
|
|
|
|
Bit00 | Enable | thermal | 0 | NO | 1 | YES |
Bit01 | Enable | observer | 0 | NO | 1 | YES |
Index: |
|
|
|
|
|
|
P1780[0] : 1st. Drive data set (DDS)
P1780[1] : 2nd. Drive data set (DDS)
P1780[2] : 3rd. Drive data set (DDS)
Note:
Only stator resistance adaptation is carried out for synchronous motors.
186 | MICROMASTER 440 Parameter List |