Parameter Description | Issue 01/06 |
P0352[3] Cable resistance |
|
| Min: | 0.0 | |
CStat: | CUT | Datatype: Float | Unit: Ohm | Def: | 0.0 |
MOTOR | Active: Immediately | QuickComm.: No | Max: | 120.0 | |
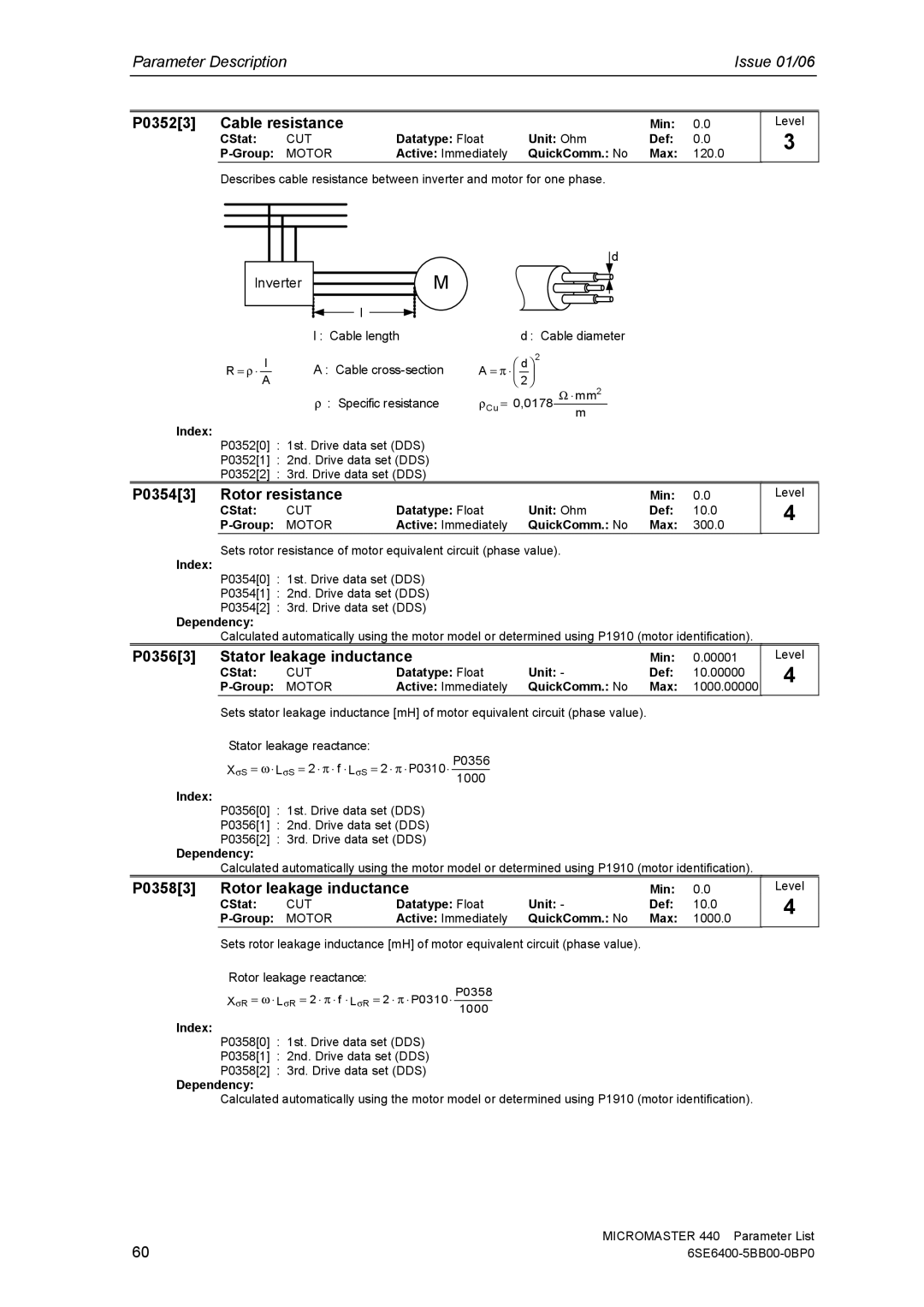
Describes cable resistance between inverter and motor for one phase.
d
Level
3
Inverter | M |
|
|
|
| |
|
| l |
|
|
|
|
|
| l : Cable length |
| d : Cable diameter | ||
R = ρ ⋅ | l | A : Cable | A = π | d | 2 |
|
A | ⋅ | |
| |||
|
|
| 2 | | Ω ⋅ mm2 | |
|
| ρ : Specific resistance | ρ Cu = | 0,0178 | ||
|
|
|
|
|
| m |
Index:
P0352[0] : 1st. Drive data set (DDS)
P0352[1] : 2nd. Drive data set (DDS)
P0352[2] : 3rd. Drive data set (DDS)
P0354[3] Rotor resistance |
|
| Min: | 0.0 | |
CStat: | CUT | Datatype: Float | Unit: Ohm | Def: | 10.0 |
MOTOR | Active: Immediately | QuickComm.: No | Max: | 300.0 | |
Level
4
Sets rotor resistance of motor equivalent circuit (phase value).
Index:
P0354[0] : 1st. Drive data set (DDS)
P0354[1] : 2nd. Drive data set (DDS)
P0354[2] : 3rd. Drive data set (DDS)
Dependency:
Calculated automatically using the motor model or determined using P1910 (motor identification).
P0356[3] Stator leakage inductance |
| Min: | 0.00001 | ||
CStat: | CUT | Datatype: Float | Unit: - | Def: | 10.00000 |
MOTOR | Active: Immediately | QuickComm.: No | Max: | 1000.00000 | |
Level
4
Sets stator leakage inductance [mH] of motor equivalent circuit (phase value).
Stator leakage reactance:
Xσ S = ω | ⋅ Lσ S = 2 ⋅ π ⋅ f ⋅ Lσ S = 2 ⋅ π ⋅ P0310⋅ | P0356 |
|
| 1000 |
Index: |
|
|
P0356[0] | : 1st. Drive data set (DDS) |
|
P0356[1] | : 2nd. Drive data set (DDS) |
|
P0356[2] | : 3rd. Drive data set (DDS) |
|
Dependency:
Calculated automatically using the motor model or determined using P1910 (motor identification).
P0358[3] Rotor leakage inductance |
| Min: | 0.0 | ||
CStat: | CUT | Datatype: Float | Unit: - | Def: | 10.0 |
MOTOR | Active: Immediately | QuickComm.: No | Max: | 1000.0 | |
Level
4
Sets rotor leakage inductance [mH] of motor equivalent circuit (phase value).
Rotor leakage reactance:
Xσ R = ω | ⋅ Lσ R = 2 ⋅ π ⋅ f ⋅ Lσ R = 2 ⋅ π ⋅ P0310⋅ | P0358 | |
1000 | |||
|
| ||
Index: |
|
| |
P0358[0] | : 1st. Drive data set (DDS) |
| |
P0358[1] | : 2nd. Drive data set (DDS) |
| |
P0358[2] | : 3rd. Drive data set (DDS) |
| |
Dependency: |
|
|
Calculated automatically using the motor model or determined using P1910 (motor identification).
60 | MICROMASTER 440 Parameter List |