Parameter Description | Issue 01/06 |
P1082[3] Max. frequency |
|
| Min: | 0.00 | |
CStat: | CT | Datatype: Float | Unit: Hz | Def: | 50.00 |
| SETPOINT | Active: first confirm | QuickComm.: Yes | Max: | 650.00 |
Level
1
Sets maximum motor frequency [Hz] at which motor will run irrespective of the frequency setpoint. The value set here is valid for both clockwise and anticlockwise rotation.
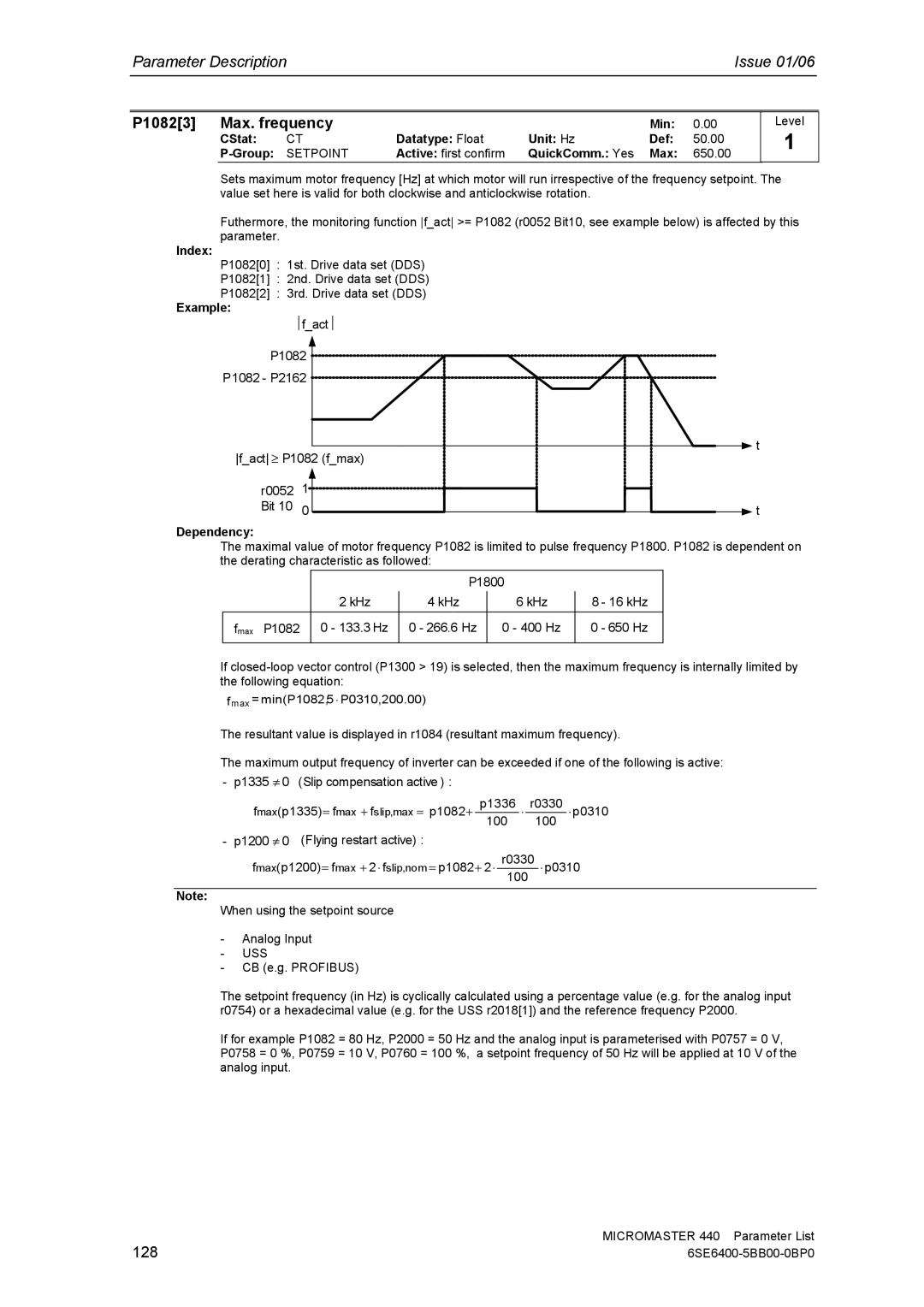
Futhermore, the monitoring function f_act >= P1082 (r0052 Bit10, see example below) is affected by this parameter.
Index:
P1082[0] : 1st. Drive data set (DDS)
P1082[1] : 2nd. Drive data set (DDS)
P1082[2] : 3rd. Drive data set (DDS)
Example:
f_act |
P1082 |
P1082 - P2162 |
t |
f_act ≥ P1082 (f_max) |
r0052 | 1 |
|
Bit 10 | 0 | t |
Dependency:
The maximal value of motor frequency P1082 is limited to pulse frequency P1800. P1082 is dependent on the derating characteristic as followed:
|
|
| P1800 |
| |
| 2 kHz | 4 kHz | 6 kHz | 8 - 16 kHz | |
fmax P1082 | 0 - 133.3 Hz | 0 - 266.6 Hz | 0 - 400 Hz | 0 - 650 Hz | |
|
|
|
|
|
|
If
fmax = min(P1082,5 ⋅ P0310,200.00)
The resultant value is displayed in r1084 (resultant maximum frequency).
The maximum output frequency of inverter can be exceeded if one of the following is active:
- p1335 ≠ 0 (Slip compensation active ) :
fmax(p1335)= fmax + fslip,max = p1082+ p1336 ⋅ r0330 ⋅ p0310
100 100
- p1200 ≠ 0 (Flying restart active) :
fmax(p1200)= fmax + 2 ⋅ fslip,nom = p1082+ 2 ⋅ r0330100 ⋅ p0310
Note:
When using the setpoint source
-Analog Input
-USS
-CB (e.g. PROFIBUS)
The setpoint frequency (in Hz) is cyclically calculated using a percentage value (e.g. for the analog input r0754) or a hexadecimal value (e.g. for the USS r2018[1]) and the reference frequency P2000.
If for example P1082 = 80 Hz, P2000 = 50 Hz and the analog input is parameterised with P0757 = 0 V, P0758 = 0 %, P0759 = 10 V, P0760 = 100 %, a setpoint frequency of 50 Hz will be applied at 10 V of the analog input.
128 | MICROMASTER 440 Parameter List |