Issue 01/06 | Parameter Description |
P1336[3] Slip limit |
|
|
| Min: | 0 |
CStat: | CUT | Datatype: U16 | Unit: % | Def: | 250 |
CONTROL | Active: Immediately | QuickComm.: No | Max: | 600 |
Level
2
Compensation slip limit in [%] relative to r0330 (rated motor slip), which is added to frequency setpoint.
Index:
P1336[0] : 1st. Drive data set (DDS)
P1336[1] : 2nd. Drive data set (DDS)
P1336[2] : 3rd. Drive data set (DDS)
Dependency:
Slip compensation (P1335) active.
r1337 | CO: V/f slip frequency |
| Min: | - |
| Datatype: Float | Unit: % | Def: | - |
|
| Max: | - |
Displays actual compensated motor slip as [%]
Dependency:
Slip compensation (P1335) active.
Level
3
3.29.1.2Resonance damping
P1338[3] Resonance damping gain V/f |
| Min: | 0.00 | ||
CStat: | CUT | Datatype: Float | Unit: - | Def: | 0.00 |
CONTROL | Active: Immediately | QuickComm.: No | Max: | 10.00 | |
Level
3
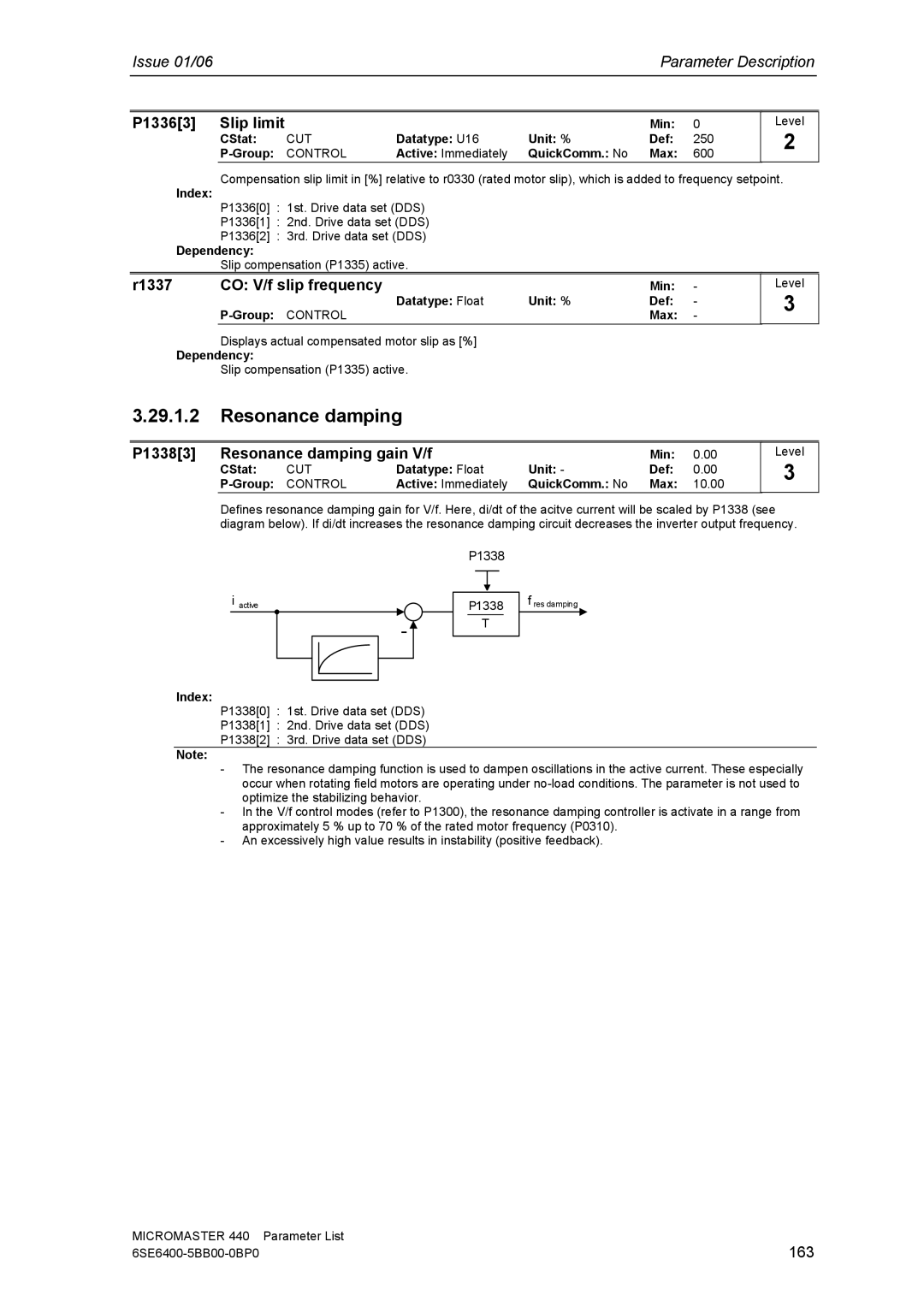
Defines resonance damping gain for V/f. Here, di/dt of the acitve current will be scaled by P1338 (see diagram below). If di/dt increases the resonance damping circuit decreases the inverter output frequency.
P1338
i active
![]()
P1338
T
f res damping
Index:
P1338[0] : 1st. Drive data set (DDS)
P1338[1] : 2nd. Drive data set (DDS)
P1338[2] : 3rd. Drive data set (DDS)
Note:
-The resonance damping function is used to dampen oscillations in the active current. These especially occur when rotating field motors are operating under
-In the V/f control modes (refer to P1300), the resonance damping controller is activate in a range from approximately 5 % up to 70 % of the rated motor frequency (P0310).
-An excessively high value results in instability (positive feedback).
MICROMASTER 440 | Parameter List |
163 |