Issue 01/06 | Parameter Description |
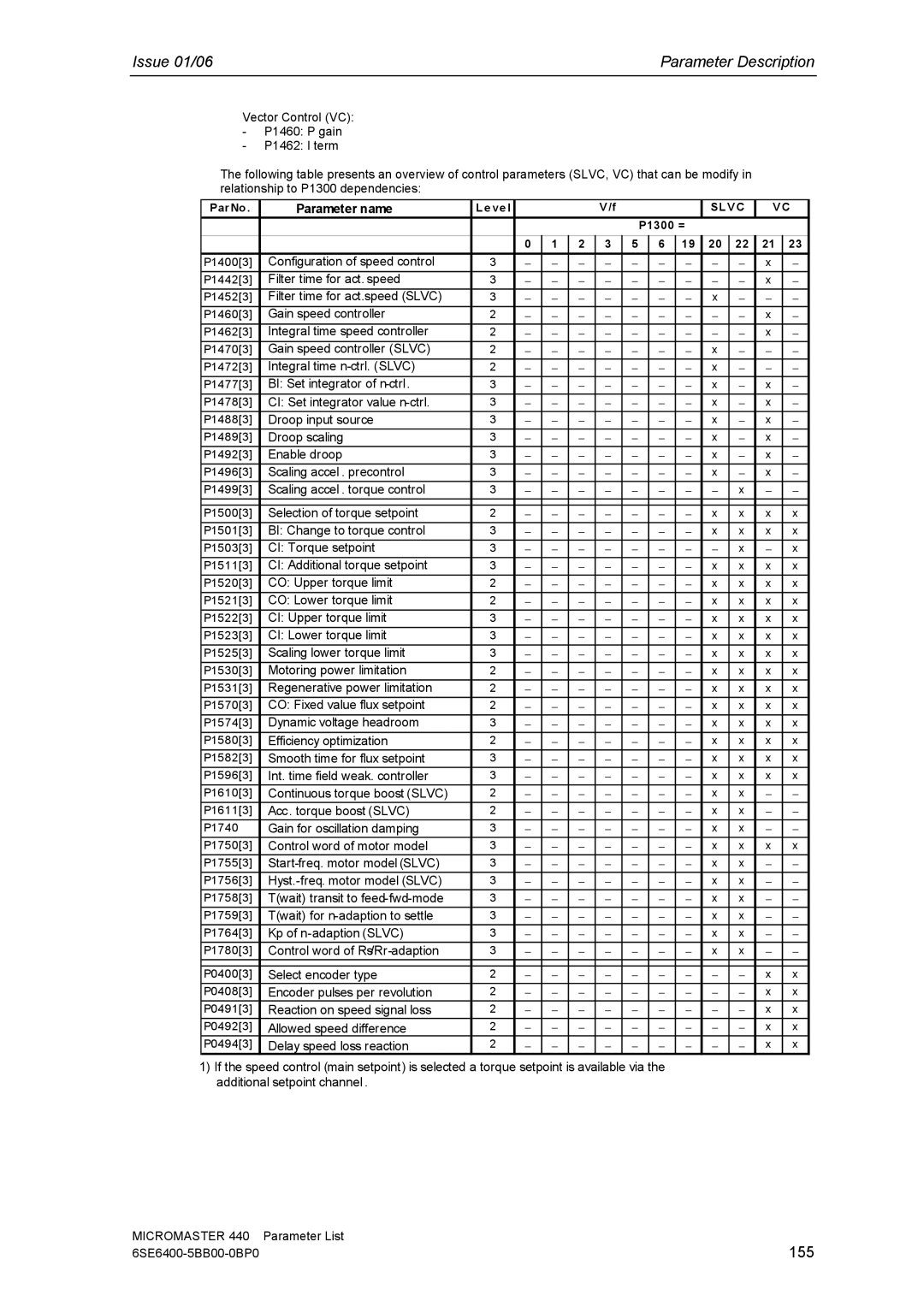
Vector Control (VC):
-P1460: P gain
-P1462: I term
The following table presents an overview of control parameters (SLVC, VC) that can be modify in relationship to P1300 dependencies:
Par No . | Parameter name | Le ve l |
|
|
|
| V /f |
|
|
| SL V C | V C | ||
|
|
|
|
|
|
|
| P1300 = |
|
|
|
| ||
|
|
| 0 | 1 | 2 |
| 3 | 5 | 6 | 19 | 20 | 22 | 21 | 23 |
P1400[3] | Configuration of speed control | 3 | − | − | − | − | − | − | − | − | − |
| x | − |
P1442[3] | Filter time for act. speed | 3 | − | − | − | − | − | − | − | − | − |
| x | − |
P1452[3] | Filter time for act.speed (SLVC) | 3 | − | − | − | − | − | − | − |
| x | − | − | − |
P1460[3] | Gain speed controller | 2 | − | − | − | − | − | − | − | − | − |
| x | − |
P1462[3] | Integral time speed controller | 2 | − | − | − | − | − | − | − | − | − |
| x | − |
P1470[3] | Gain speed controller (SLVC) | 2 | − | − | − | − | − | − | − |
| x | − | − | − |
P1472[3] | Integral time | 2 | − | − | − | − | − | − | − |
| x | − | − | − |
P1477[3] | BI: Set integrator of | 3 | − | − | − | − | − | − | − |
| x | − | x | − |
P1478[3] | CI: Set integrator value | 3 | − | − | − | − | − | − | − |
| x | − | x | − |
P1488[3] | Droop input source | 3 | − | − | − | − | − | − | − |
| x | − | x | − |
P1489[3] | Droop scaling | 3 | − | − | − | − | − | − | − |
| x | − | x | − |
P1492[3] | Enable droop | 3 | − | − | − | − | − | − | − |
| x | − | x | − |
P1496[3] | Scaling accel . precontrol | 3 | − | − | − | − | − | − | − |
| x | − | x | − |
P1499[3] | Scaling accel . torque control | 3 | − | − | − | − | − | − | − | − |
| x | − | − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1500[3] | Selection of torque setpoint | 2 | − | − | − | − | − | − | − |
| x | x | x | x |
P1501[3] | BI: Change to torque control | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1503[3] | CI: Torque setpoint | 3 | − | − | − | − | − | − | − | − |
| x | − | x |
P1511[3] | CI: Additional torque setpoint | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1520[3] | CO: Upper torque limit | 2 | − | − | − | − | − | − | − |
| x | x | x | x |
P1521[3] | CO: Lower torque limit | 2 | − | − | − | − | − | − | − |
| x | x | x | x |
P1522[3] | CI: Upper torque limit | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1523[3] | CI: Lower torque limit | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1525[3] | Scaling lower torque limit | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1530[3] | Motoring power limitation | 2 | − | − | − | − | − | − | − |
| x | x | x | x |
P1531[3] | Regenerative power limitation | 2 | − | − | − | − | − | − | − |
| x | x | x | x |
P1570[3] | CO: Fixed value flux setpoint | 2 | − | − | − | − | − | − | − |
| x | x | x | x |
P1574[3] | Dynamic voltage headroom | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1580[3] | Efficiency optimization | 2 | − | − | − | − | − | − | − |
| x | x | x | x |
P1582[3] | Smooth time for flux setpoint | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1596[3] | Int. time field weak. controller | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1610[3] | Continuous torque boost (SLVC) | 2 | − | − | − | − | − | − | − |
| x | x | − | − |
P1611[3] | Acc. torque boost (SLVC) | 2 | − | − | − | − | − | − | − |
| x | x | − | − |
P1740 | Gain for oscillation damping | 3 | − | − | − | − | − | − | − |
| x | x | − | − |
P1750[3] | Control word of motor model | 3 | − | − | − | − | − | − | − |
| x | x | x | x |
P1755[3] | 3 | − | − | − | − | − | − | − |
| x | x | − | − | |
P1756[3] | 3 | − | − | − | − | − | − | − |
| x | x | − | − | |
P1758[3] | T(wait) transit to | 3 | − | − | − | − | − | − | − |
| x | x | − | − |
P1759[3] | T(wait) for | 3 | − | − | − | − | − | − | − |
| x | x | − | − |
P1764[3] | Kp of | 3 | − | − | − | − | − | − | − |
| x | x | − | − |
P1780[3] | Control word of | 3 | − | − | − | − | − | − | − |
| x | x | − | − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P0400[3] | Select encoder type | 2 | − | − | − | − | − | − | − | − | − |
| x | x |
P0408[3] | Encoder pulses per revolution | 2 | − | − | − | − | − | − | − | − | − |
| x | x |
P0491[3] | Reaction on speed signal loss | 2 | − | − | − | − | − | − | − | − | − |
| x | x |
P0492[3] | Allowed speed difference | 2 | − | − | − | − | − | − | − | − | − |
| x | x |
P0494[3] | Delay speed loss reaction | 2 | − | − | − | − | − | − | − | − | − |
| x | x |
1)If the speed control (main setpoint) is selected a torque setpoint is available via the additional setpoint channel .
MICROMASTER 440 | Parameter List |
155 |