Parameter Description | Issue 01/06 |
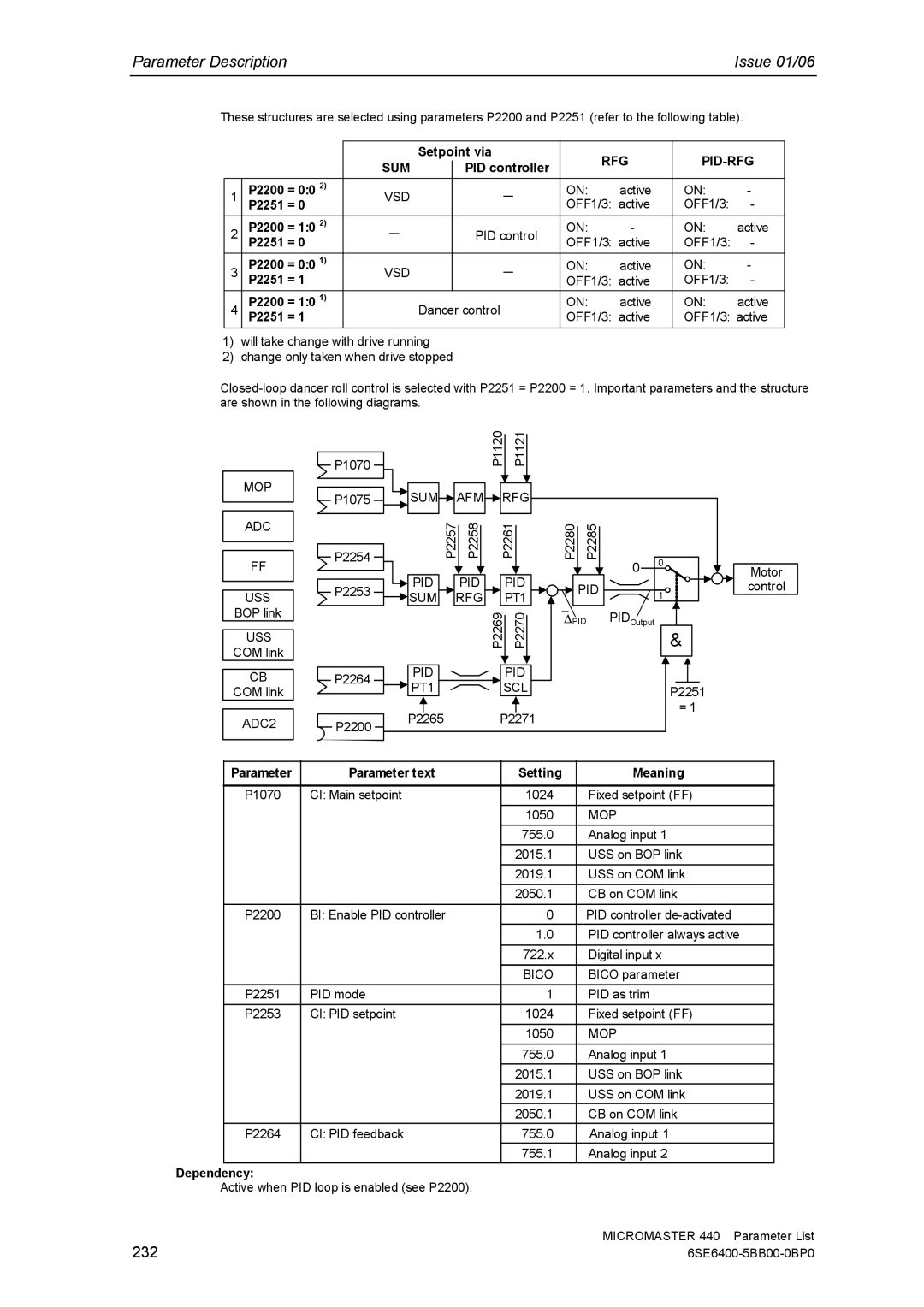
These structures are selected using parameters P2200 and P2251 (refer to the following table).
|
|
|
| Setpoint via | RFG |
| |||
|
|
| SUM |
| PID controller | ||||
|
|
|
|
|
|
|
| ||
1 | P2200 | = 0:0 2) | VSD |
| − | ON: | active | ON: | - |
| P2251 | = 0 |
|
|
| OFF1/3: | active | OFF1/3: | - |
2 | P2200 | = 1:0 2) | − |
| PID control | ON: | - | ON: | active |
| P2251 | = 0 |
|
|
| OFF1/3: | active | OFF1/3: | - |
3 | P2200 | = 0:0 1) | VSD |
| − | ON: | active | ON: | - |
| P2251 | = 1 |
|
|
| OFF1/3: | active | OFF1/3: | - |
4 | P2200 | = 1:0 1) |
| Dancer control | ON: | active | ON: | active | |
P2251 | = 1 |
| OFF1/3: | active | OFF1/3: active | ||||
1)will take change with drive running
2)change only taken when drive stopped
MOP
ADC
FF
USS
BOP link
USS COM link
CB
COM link
ADC2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| P1120 |
|
| P1121 |
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
|
| P1070 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| SUM |
| AFM |
|
| RFG |
|
|
|
|
|
|
|
| ||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||
|
| P1075 |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| P2257 |
| P2258 |
|
|
| P2261 |
|
|
|
|
|
|
| P2280 |
| P2285 |
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
| P2254 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| PID |
|
|
| PID |
|
|
| PID |
|
|
|
|
| PID | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||
|
| P2253 |
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||
|
|
|
|
| SUM |
|
| RFG |
|
|
| PT1 |
|
|
| −∆ |
| ||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| P2269 |
|
| P2270 |
|
|
|
|
| PID | |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| PID |
|
|
|
|
|
|
| PID |
|
|
|
|
|
|
|
| |||||||||
|
| P2264 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
|
|
|
|
|
|
| PT1 |
|
|
|
|
|
|
| SCL |
|
|
|
|
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
| P2265 |
|
|
|
| P2271 |
|
|
|
|
|
|
| |||||||||||||
|
| P2200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
0
PIDOutput
0
1
&
P2251
= 1
Motor control
Parameter | Parameter text | Setting | Meaning |
|
|
|
|
P1070 | CI: Main setpoint | 1024 | Fixed setpoint (FF) |
|
| 1050 | MOP |
|
| 755.0 | Analog input 1 |
|
| 2015.1 | USS on BOP link |
|
| 2019.1 | USS on COM link |
|
| 2050.1 | CB on COM link |
P2200 | BI: Enable PID controller | 0 | PID controller |
|
| 1.0 | PID controller always active |
|
| 722.x | Digital input x |
|
| BICO | BICO parameter |
P2251 | PID mode | 1 | PID as trim |
P2253 | CI: PID setpoint | 1024 | Fixed setpoint (FF) |
|
| 1050 | MOP |
|
| 755.0 | Analog input 1 |
|
| 2015.1 | USS on BOP link |
|
| 2019.1 | USS on COM link |
|
| 2050.1 | CB on COM link |
P2264 | CI: PID feedback | 755.0 | Analog input 1 |
|
| 755.1 | Analog input 2 |
Dependency:
Active when PID loop is enabled (see P2200).
232 | MICROMASTER 440 Parameter List |