Issue 01/06 | Parameter Description |
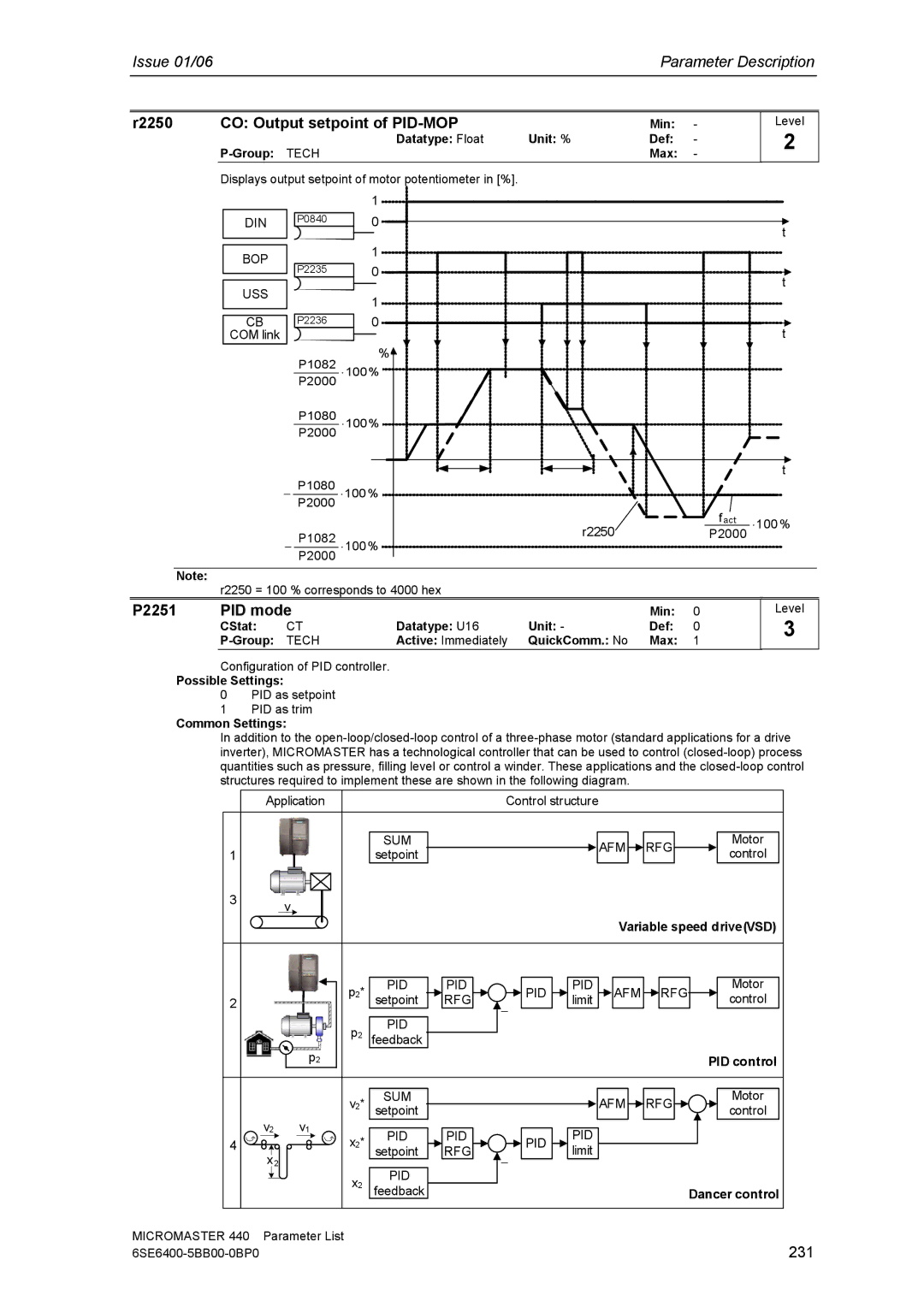
r2250 | CO: Output setpoint of |
| Min: | - |
| Datatype: Float | Unit: % | Def: | - |
|
|
| Max: | - |
Displays output setpoint of motor potentiometer in [%].
Level
2
|
|
|
| 1 |
|
|
|
|
| DIN |
| P0840 | 0 |
|
|
| t |
|
|
|
|
|
|
|
| |
| BOP |
|
| 1 |
|
|
|
|
|
| P2235 | 0 |
|
|
|
| |
|
|
|
|
|
| t | ||
| USS |
|
|
|
|
|
| |
|
|
| 1 |
|
|
|
| |
|
|
|
|
|
|
|
| |
| CB |
| P2236 | 0 |
|
|
| t |
| COM link |
|
|
|
|
|
| |
|
|
| P1082 | % |
|
|
|
|
|
|
| ⋅ 100 % |
|
|
|
| |
|
|
| P2000 |
|
|
|
|
|
|
|
| P1080 | ⋅ 100 % |
|
|
|
|
|
|
| P2000 |
|
|
|
|
|
|
|
| P1080 |
|
|
|
| t |
|
| − | ⋅ 100 % |
|
|
|
| |
|
|
| P2000 |
|
|
| f act |
|
|
|
|
|
| r2250 |
| ⋅ 100 % | |
|
| − | P1082 | ⋅ 100 % |
| P2000 | ||
|
|
|
|
|
| |||
|
|
| P2000 |
|
|
|
|
|
Note: | r2250 = 100 % corresponds to 4000 hex |
|
|
|
| |||
|
|
|
|
| ||||
P2251 | PID mode |
|
|
| Min: | 0 | Level | |
| CStat: | CT | Datatype: U16 | Unit: - | Def: | 0 | 3 | |
| TECH | Active: Immediately | QuickComm.: No | Max: | 1 | |||
|
| |||||||
Configuration of PID controller.
Possible Settings:
0PID as setpoint
1PID as trim
Common Settings:
In addition to the
| Application |
|
| Control structure |
|
|
| ||
|
|
| SUM |
|
|
| AFM | RFG | Motor |
1 |
|
| setpoint |
|
|
| control | ||
|
|
|
|
|
|
| |||
3 |
| v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
| Variable speed drive(VSD) | ||
|
| p2* | PID | PID | PID | PID | AFM | RFG | Motor |
2 |
| setpoint | RFG | limit | control | ||||
|
|
|
| − |
|
|
|
| |
|
| p2 | PID |
|
|
|
|
|
|
|
| feedback |
|
|
|
|
|
| |
|
| p2 |
|
|
|
|
|
| PID control |
|
|
|
|
|
|
|
|
| |
|
| v2* | SUM |
|
|
| AFM | RFG | Motor |
|
| setpoint |
|
|
| control | |||
| v2 | v1 | PID | PID |
| PID |
|
|
|
4 |
| x2* | PID |
|
|
| |||
x2 | setpoint | RFG | limit |
|
|
| |||
|
| − |
|
|
| ||||
|
| PID |
|
|
|
|
| ||
|
| x2 |
|
|
|
|
|
| |
|
| feedback |
|
|
|
|
| Dancer control | |
MICROMASTER 440 | Parameter List |
|
|
|
|
|
| 231 | |
|
|
|
|
|
|
|
| ||