Issue 01/06 | Parameter Description |
3.5Speed encoder
P0400[3] Select encoder type |
|
| Min: | 0 | |
CStat: | CT | Datatype: U16 | Unit: - | Def: | 0 |
ENCODER | Active: Immediately | QuickComm.: No | Max: | 2 | |
Level
2
Selects encoder type (number of encoder channels).
Possible Settings:
0Disabled
1Single channel encoder
2Quadrature encoder without zero pulse
Index:
P0400[0] : 1st. Drive data set (DDS)
P0400[1] : 2nd. Drive data set (DDS)
P0400[2] : 3rd. Drive data set (DDS)
Dependency:
Following table displays the setting of P0400 which depends upon the number of encoder channels:
Parameter | Terminal |
|
|
|
|
|
| Track |
|
|
|
|
|
|
| Encoder output | |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P0400 = 1 | A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| single ended |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| differential |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
| AN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P0400 = 2 | A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| single ended |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
| B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| differential |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| AN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| BN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
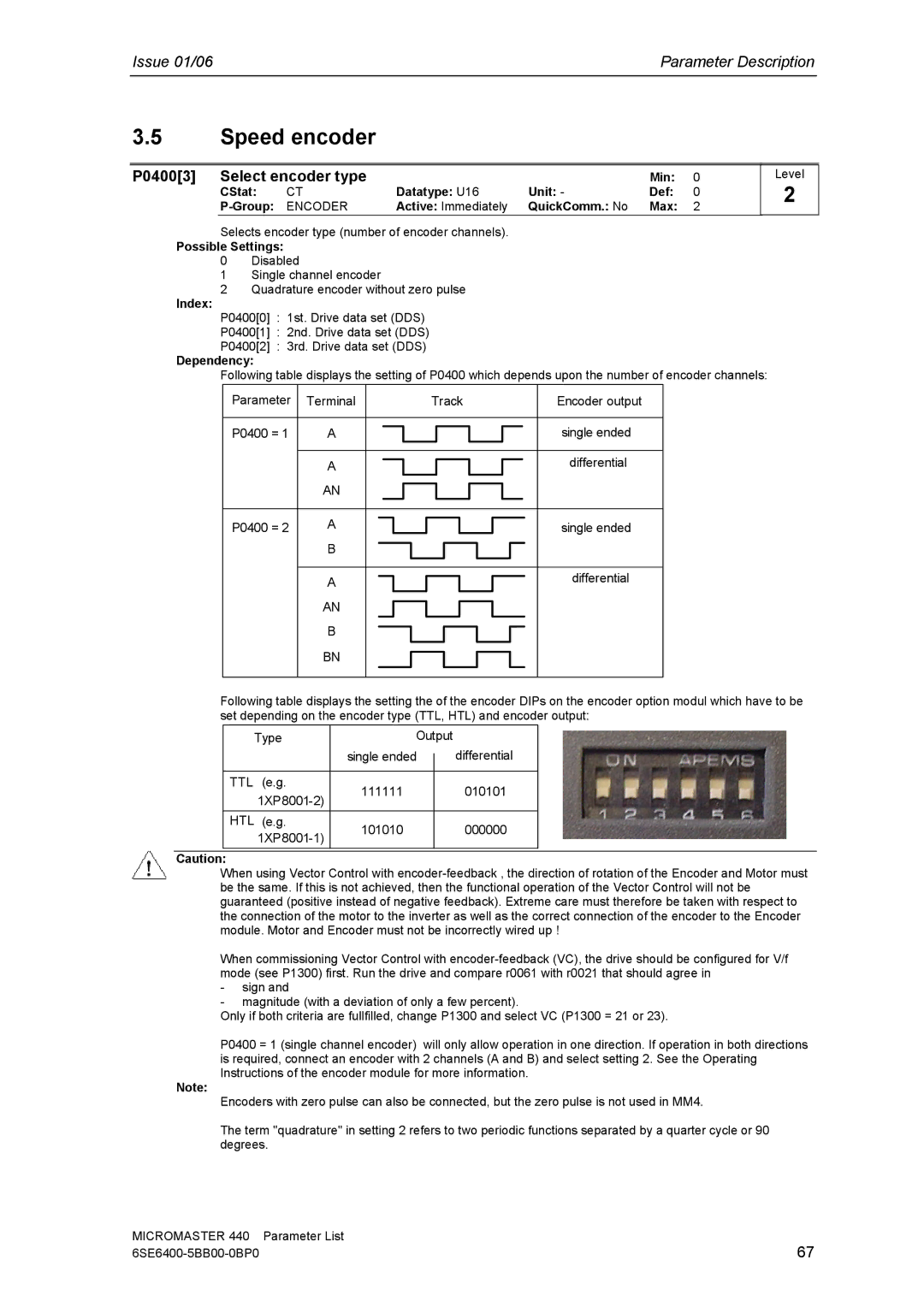
Following table displays the setting the of the encoder DIPs on the encoder option modul which have to be set depending on the encoder type (TTL, HTL) and encoder output:
|
| Type | Output |
|
| ||
|
|
| single ended |
|
| differential |
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
| TTL | (e.g. | 111111 |
|
| 010101 |
|
|
|
|
|
| |||
|
|
|
|
|
|
| |
| HTL | (e.g. | 101010 |
|
| 000000 |
|
|
|
|
|
| |||
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
Caution:
When using Vector Control with
When commissioning Vector Control with
-sign and
-magnitude (with a deviation of only a few percent).
Only if both criteria are fullfilled, change P1300 and select VC (P1300 = 21 or 23).
P0400 = 1 (single channel encoder) will only allow operation in one direction. If operation in both directions is required, connect an encoder with 2 channels (A and B) and select setting 2. See the Operating Instructions of the encoder module for more information.
Note:
Encoders with zero pulse can also be connected, but the zero pulse is not used in MM4.
The term "quadrature" in setting 2 refers to two periodic functions separated by a quarter cycle or 90 degrees.
MICROMASTER 440 | Parameter List |
67 |