290
BI: Enable JOG
| P1055.C |
|
|
|
|
|
|
| |||
| (0:0) |
|
|
|
|
|
|
|
|
|
|
BI: Enable JOG <- |
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
| |||
| P1056.C |
|
|
|
|
|
|
|
|
|
|
| (0:0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
CI: Main setpoint | CO: Tot. freq.setp [Hz] |
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
| ||
| P1070.C |
|
|
|
| r1078 |
|
|
|
| |
(755:0) |
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
| ||||
CI: Main setp scal |
|
| JOG frequency |
| 0 1 | ||||||
|
|
|
|
|
| 0.00 ... 650.00 [Hz] |
| ||||
| P1071.C |
|
|
|
| P1058.D (5.00) |
|
|
|
| |
(1:0) |
|
|
|
|
|
|
|
| |||
|
|
|
| JOG frequency <- |
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| |
+0.00 ... 650.00 [Hz] ![]()
![]() 1 0
1 0
|
| P1059.D (5.00) |
|
|
|
|
| |
BI: Disab.add.setp |
| + | 1 |
|
|
| P1082 |
|
|
| SUM/JOG |
|
| ||||
0 | 1 | AFM | 0 |
| ||||
P1074.C |
|
| ||||||
| selection |
| RFG | |||||
(0:0) |
| 0 | 0 |
|
| |||
|
|
|
| 1 | ||||
CI: Add. setp.scal |
|
|
|
|
|
|
| |
|
|
|
|
|
| P1082 |
| |
P1076.C |
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |
(1:0) |
|
| 1 |
|
|
| & |
|
CI: Add. setpoint |
|
| 0 | 0 |
|
| ||
P1075.C |
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| |
(0:0) |
|
|
|
|
|
|
|
|
CI:PID trim source |
|
|
|
|
|
| PID mode |
|
|
|
| P2291 |
| 0 ... 1 |
| ||
P2254.C |
|
|
|
|
| |||
|
|
|
| P2251 (0) |
| |||
|
|
|
|
|
| 1 | ||
(0:0) |
| PID |
|
|
|
|
| |
CI: PID setpoint |
|
|
|
|
|
|
| |
| controller |
|
|
|
|
| 0 | |
P2253.C |
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |
| Control mode |
| 0 ... 23 |
| P1300.D (0) |
P1082 *) | |
| <20 |
+ | ≥ 20 |
P1082 | *) |
| r1170 |
CO:Setp. after RFG [Hz]
V/f control
Flux | 7800 |
|
|
| 7900 |
| |||
setpoint |
|
|
| Current |
| ||||
|
| ||||||||
7500 - 7700 |
|
|
|
| |||||
|
|
|
| ||||||
|
|
|
| ||||||
|
|
| control |
| |||||
Speed / |
|
|
|
| |||||
|
|
|
|
|
|
|
| ||
torque |
|
|
|
|
|
|
|
| |
control |
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Motor model |
|
| 7900 |
| ||||
|
|
| |||||||
|
|
|
|
|
| ||||
| Motor identification |
| |||||||
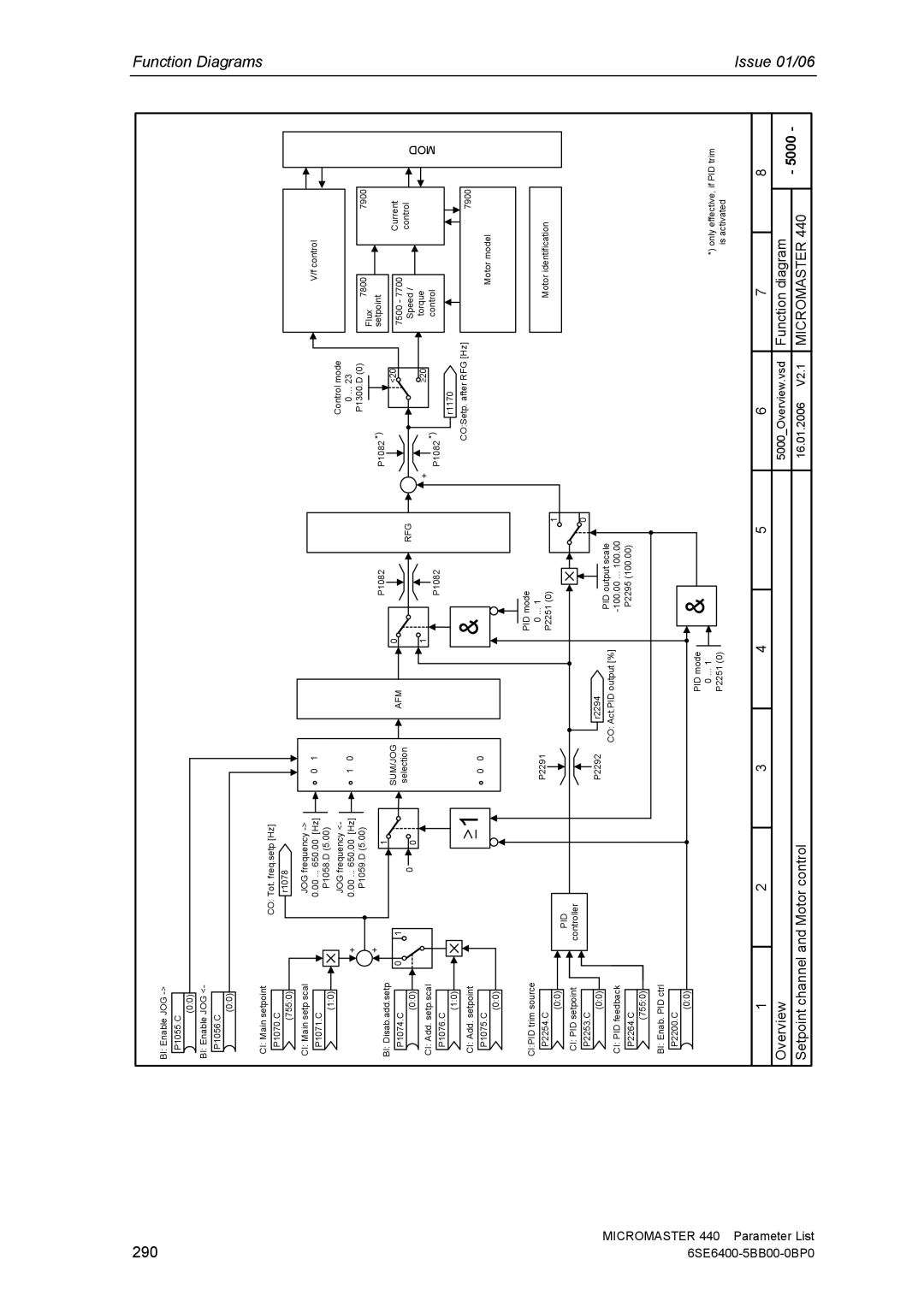
MOD
Function Diagrams
MICROMASTER 440 6SE6400
(0:0) | P2292 | r2294 | PID output scale |
|
| CO: Act.PID output [%] | |
CI: PID feedback |
| ||
|
| ||
P2264.C |
|
| P2295 (100.00) |
(755:0) |
|
|
|
BI: Enab. PID ctrl |
|
|
|
P2200.C |
|
| & |
(0:0) |
| PID mode | |
|
| ||
|
| 0 ... 1 |
|
|
| P2251 (0) |
|
*) only effective, if PID trim is activated
Parameter List -5BB00-0BP0
1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 |
Overview |
|
|
|
| 5000_Overview.vsd | Function diagram |
| - 5000 - |
Setpoint channel and Motor control |
|
|
| 16.01.2006 V2.1 | MICROMASTER 440 | |||
|
|
|
| |||||