Parameter Description | Issue 01/06 |
P2002[3] Reference current |
|
| Min: | 0.10 | |
CStat: | CT | Datatype: Float | Unit: A | Def: | 0.10 |
COMM | Active: first confirm | QuickComm.: No | Max: | 10000.00 | |
Index:
Level
3
P2002[0] : 1st. Drive data set (DDS)
P2002[1] : 2nd. Drive data set (DDS)
P2002[2] : 3rd. Drive data set (DDS)
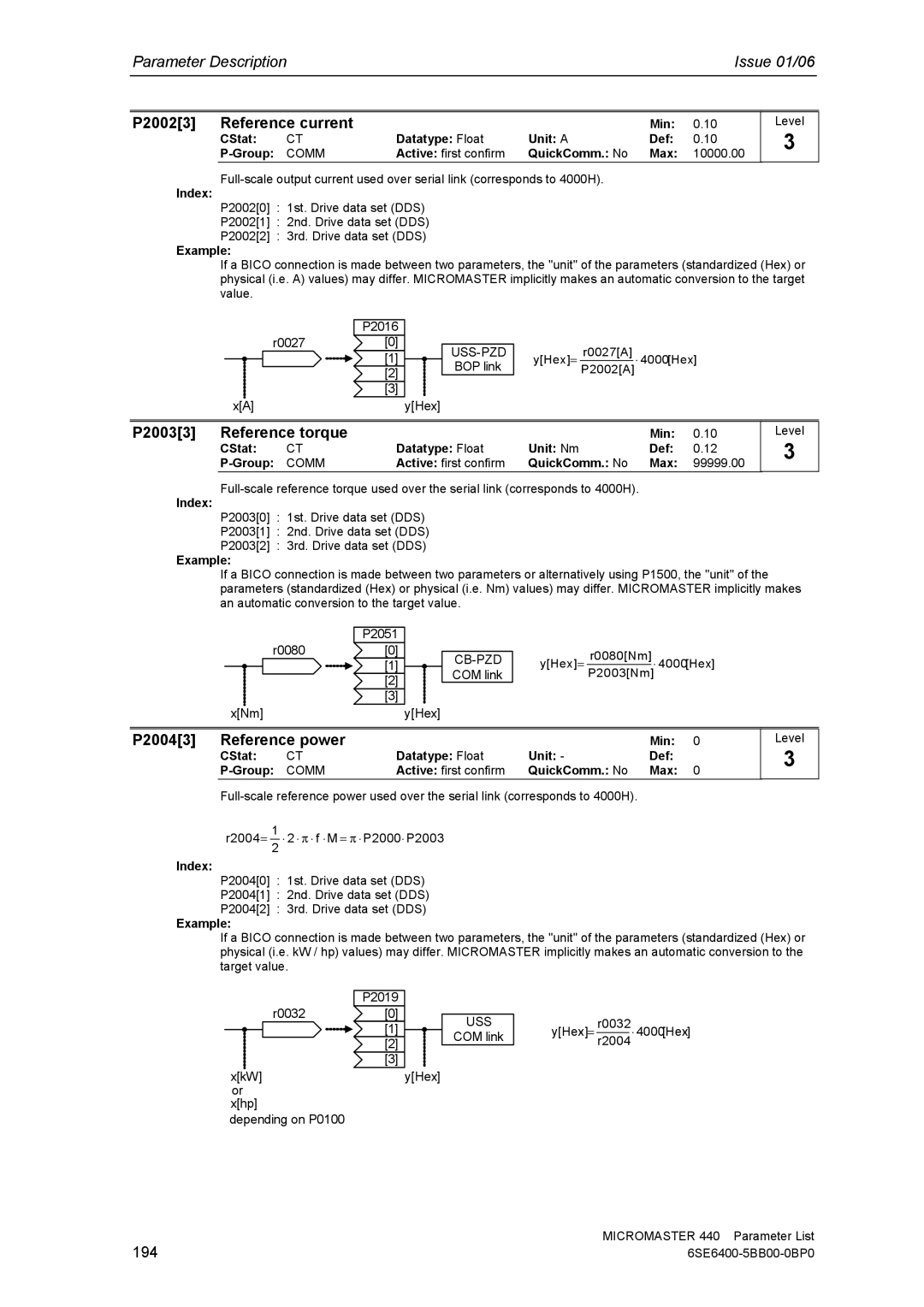
Example:
If a BICO connection is made between two parameters, the "unit" of the parameters (standardized (Hex) or physical (i.e. A) values) may differ. MICROMASTER implicitly makes an automatic conversion to the target value.
r0027
P2016
[0]
[1]
[2]
[3]
y[Hex]= P2002[A]r0027[A] ⋅ 4000[Hex]
x[A]y[Hex]
P2003[3] Reference torque |
|
| Min: | 0.10 | Level | ||
| CStat: | CT | Datatype: Float | Unit: Nm | Def: | 0.12 | 3 |
|
| ||||||
| COMM | Active: first confirm | QuickComm.: No | Max: | 99999.00 |
| |
Index:
P2003[0] : 1st. Drive data set (DDS)
P2003[1] : 2nd. Drive data set (DDS)
P2003[2] : 3rd. Drive data set (DDS)
Example:
If a BICO connection is made between two parameters or alternatively using P1500, the "unit" of the parameters (standardized (Hex) or physical (i.e. Nm) values) may differ. MICROMASTER implicitly makes an automatic conversion to the target value.
r0080
P2051
[0]
[1]
[2]
[3]
y[Hex]= P2003[Nm]r0080[Nm] ⋅ 4000[Hex]
x[Nm]y[Hex]
P2004[3] Reference power |
|
| Min: | 0 | Level | ||
| CStat: | CT | Datatype: Float | Unit: - | Def: |
| 3 |
|
|
| |||||
| COMM | Active: first confirm | QuickComm.: No | Max: | 0 |
| |
r2004= | 1 | ⋅ 2 ⋅ π ⋅ f ⋅ M = π ⋅ P2000⋅ P2003 | |
2 | |||
|
|
Index:
P2004[0] : 1st. Drive data set (DDS)
P2004[1] : 2nd. Drive data set (DDS)
P2004[2] : 3rd. Drive data set (DDS)
Example:
If a BICO connection is made between two parameters, the "unit" of the parameters (standardized (Hex) or physical (i.e. kW / hp) values) may differ. MICROMASTER implicitly makes an automatic conversion to the target value.
r0032
x[kW] or x[hp]
depending on P0100
P2019
[0]
[1]
[2]
[3]
y[Hex]
USS COM link
= r0032⋅
y[Hex] 4000[Hex] r2004
194 | MICROMASTER 440 Parameter List |