Issue 01/06 | Parameter Description |
P1781[3] Tn of |
|
| Min: | 10 | |
CStat: | CUT | Datatype: U16 | Unit: ms | Def: | 100 |
CONTROL | Active: Immediately | QuickComm.: No | Max: | 2000 | |
Level
4
Enters
Index:
P1781[0] : 1st. Drive data set (DDS)
P1781[1] : 2nd. Drive data set (DDS)
P1781[2] : 3rd. Drive data set (DDS)
r1782 | Output of |
| Min: | - | Level |
| Datatype: Float | Unit: % | Def: | - | 3 |
|
| ||||
|
| Max: | - |
|
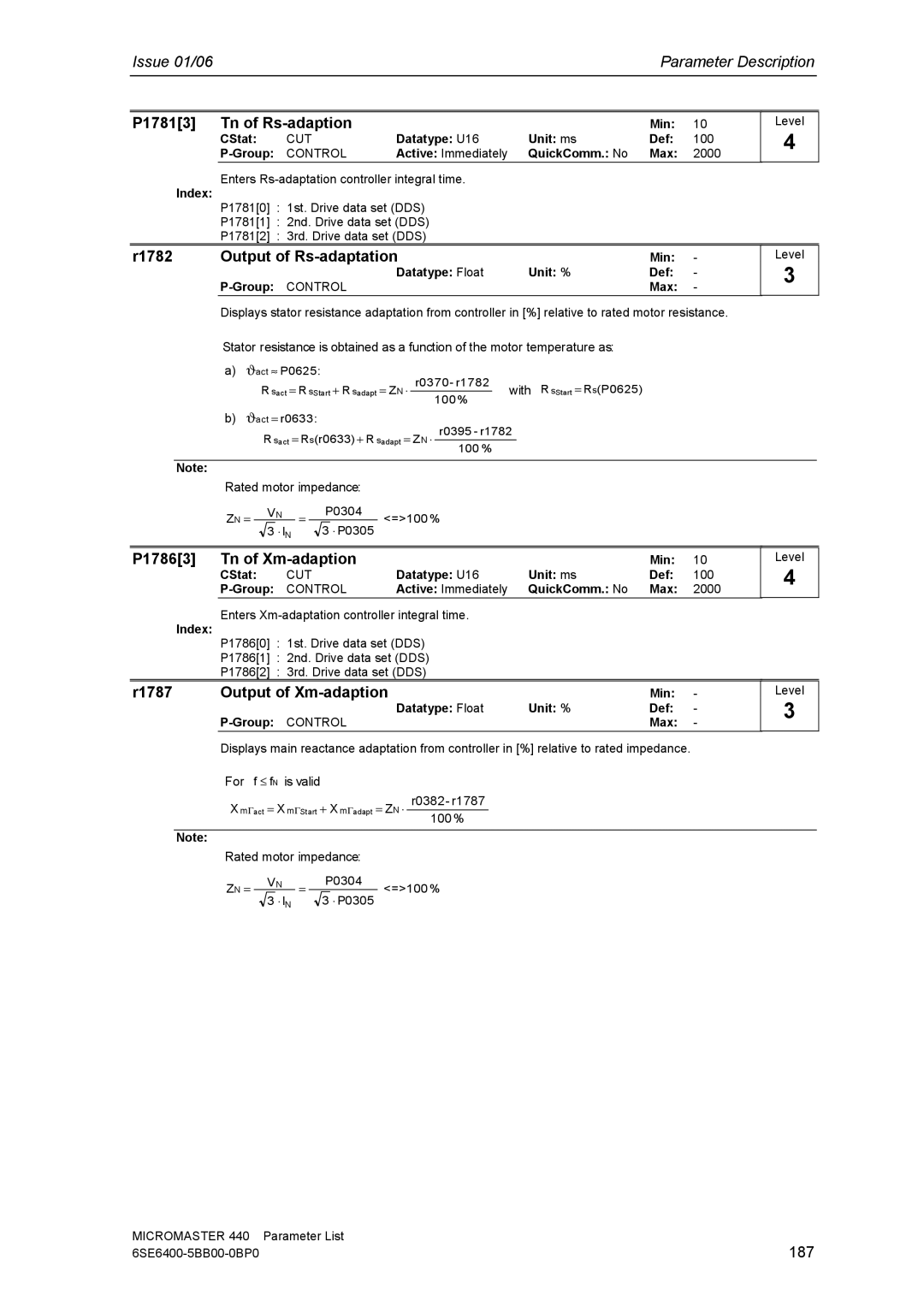
Displays stator resistance adaptation from controller in [%] relative to rated motor resistance.
Stator resistance is obtained as a function of the motor temperature as:
a) ϑ act ≈ P0625:
R sact = R sStart + R sadapt = ZN ⋅ | r0370- r1782 | with R sStart = Rs(P0625) |
| 100% |
|
b)ϑ act = r0633:
| R sact = | Rs(r0633) + | R sadapt = ZN ⋅ | r0395 - r1782 | |
|
|
|
|
| 100 % |
Note: |
|
|
|
|
|
Rated motor impedance: |
|
| |||
ZN = | VN | = | P0304 | <=>100 % | |
|
| ||||
| 3 ⋅ IN |
| 3 ⋅ P0305 |
| |
P1786[3] Tn of |
|
| Min: | 10 | |
CStat: | CUT | Datatype: U16 | Unit: ms | Def: | 100 |
CONTROL | Active: Immediately | QuickComm.: No | Max: | 2000 | |
Level
4
Enters
Index:
P1786[0] : 1st. Drive data set (DDS)
P1786[1] : 2nd. Drive data set (DDS)
P1786[2] : 3rd. Drive data set (DDS)
r1787 | Output of |
| Min: | - | Level |
| Datatype: Float | Unit: % | Def: | - | 3 |
|
| ||||
|
| Max: | - |
|
Displays main reactance adaptation from controller in [%] relative to rated impedance.
For | f ≤ fN is valid |
|
|
| ||
XmΓ act = XmΓ Start + XmΓ adapt = | ZN ⋅ | r0382- r1787 | ||||
|
|
|
|
| 100 % | |
Note: |
|
|
|
|
| |
Rated motor impedance: |
|
| ||||
ZN = | VN | = | P0304 | <=>100 % | ||
3 ⋅ IN | 3 ⋅ P0305 | |||||
|
|
|
| |||
MICROMASTER 440 | Parameter List |
187 |