Issue 01/06 | Parameter Description |
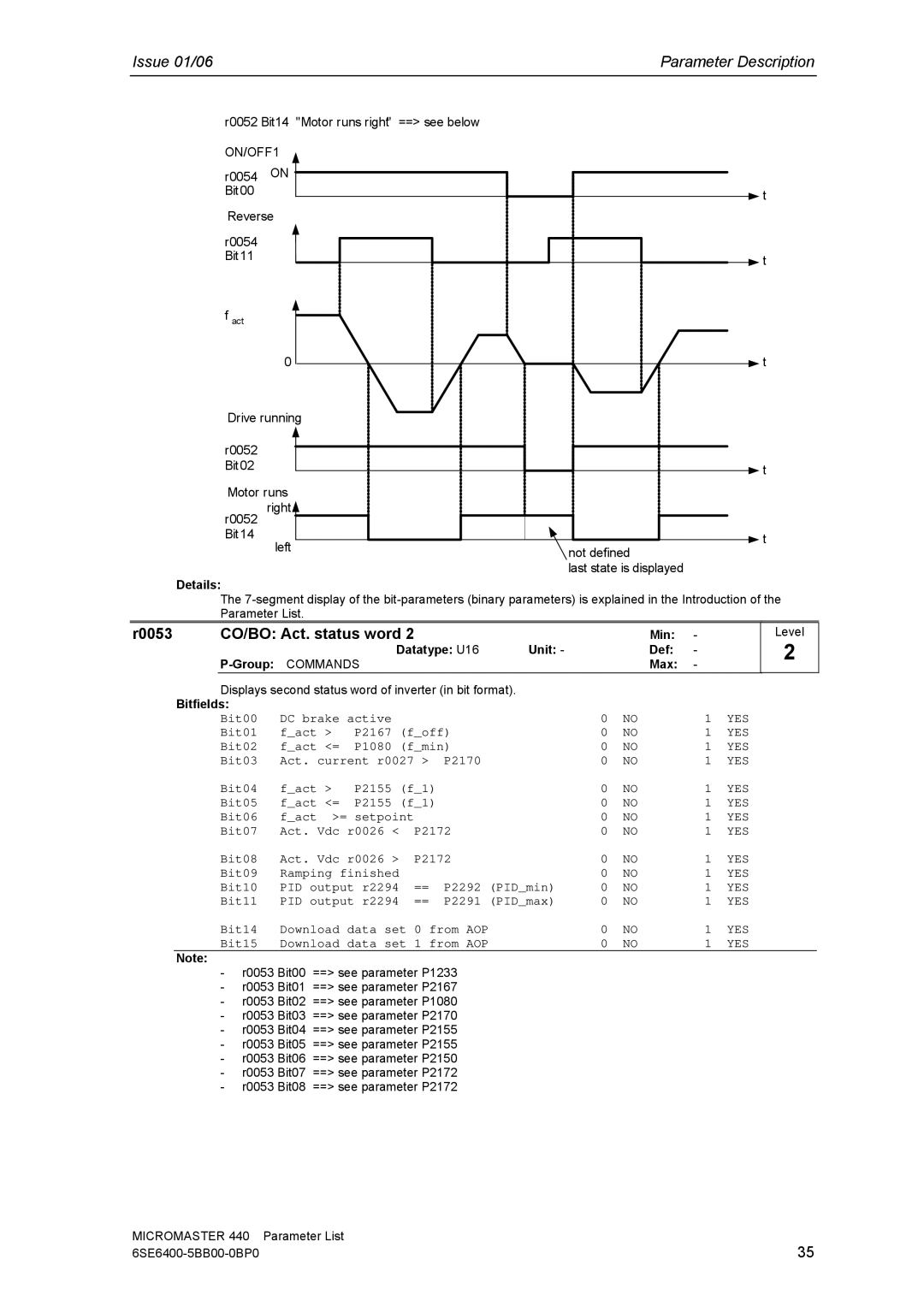
r0052 Bit14 "Motor runs right" ==> see below
ON/OFF1
r0054 ON Bit00
Reverse
r0054
Bit11
fact
0
Drive running
![]() t
t
![]() t
t
![]() t
t
r0052
Bit02
![]() t
t
Motor runs right
r0052 |
|
|
Bit14 | left | t |
| not defined | |
|
| |
|
| last state is displayed |
Details:
The
r0053 | CO/BO: Act. status word 2 |
| Min: | - |
| Datatype: U16 | Unit: - | Def: | - |
|
| Max: | - |
Displays second status word of inverter (in bit format).
Bitfields: |
|
|
|
|
|
|
|
|
Bit00 | DC brake | active |
|
| 0 | NO | 1 | YES |
Bit01 | f_act > | P2167 | (f_off) | 0 | NO | 1 | YES | |
Bit02 | f_act <= | P1080 | (f_min) | 0 | NO | 1 | YES | |
Bit03 | Act. current r0027 > | P2170 | 0 | NO | 1 | YES | ||
Bit04 | f_act > | P2155 | (f_1) |
| 0 | NO | 1 | YES |
Bit05 | f_act <= | P2155 | (f_1) |
| 0 | NO | 1 | YES |
Bit06 | f_act >= setpoint |
| 0 | NO | 1 | YES | ||
Bit07 | Act. Vdc | r0026 < | P2172 | 0 | NO | 1 | YES | |
Bit08 | Act. Vdc | r0026 > | P2172 | 0 | NO | 1 | YES | |
Bit09 | Ramping finished |
|
| 0 | NO | 1 | YES | |
Bit10 | PID output r2294 | == | P2292 (PID_min) | 0 | NO | 1 | YES | |
Bit11 | PID output r2294 | == | P2291 (PID_max) | 0 | NO | 1 | YES | |
Bit14 | Download | data set 0 from AOP | 0 | NO | 1 | YES | ||
Bit15 | Download | data set 1 from AOP | 0 | NO | 1 | YES | ||
Level
2
Note:
-r0053 Bit00 ==> see parameter P1233
-r0053 Bit01 ==> see parameter P2167
-r0053 Bit02 ==> see parameter P1080
-r0053 Bit03 ==> see parameter P2170
-r0053 Bit04 ==> see parameter P2155
-r0053 Bit05 ==> see parameter P2155
-r0053 Bit06 ==> see parameter P2150
-r0053 Bit07 ==> see parameter P2172
-r0053 Bit08 ==> see parameter P2172
MICROMASTER 440 | Parameter List |
35 |