298
MICROMASTER 440 Parameter List
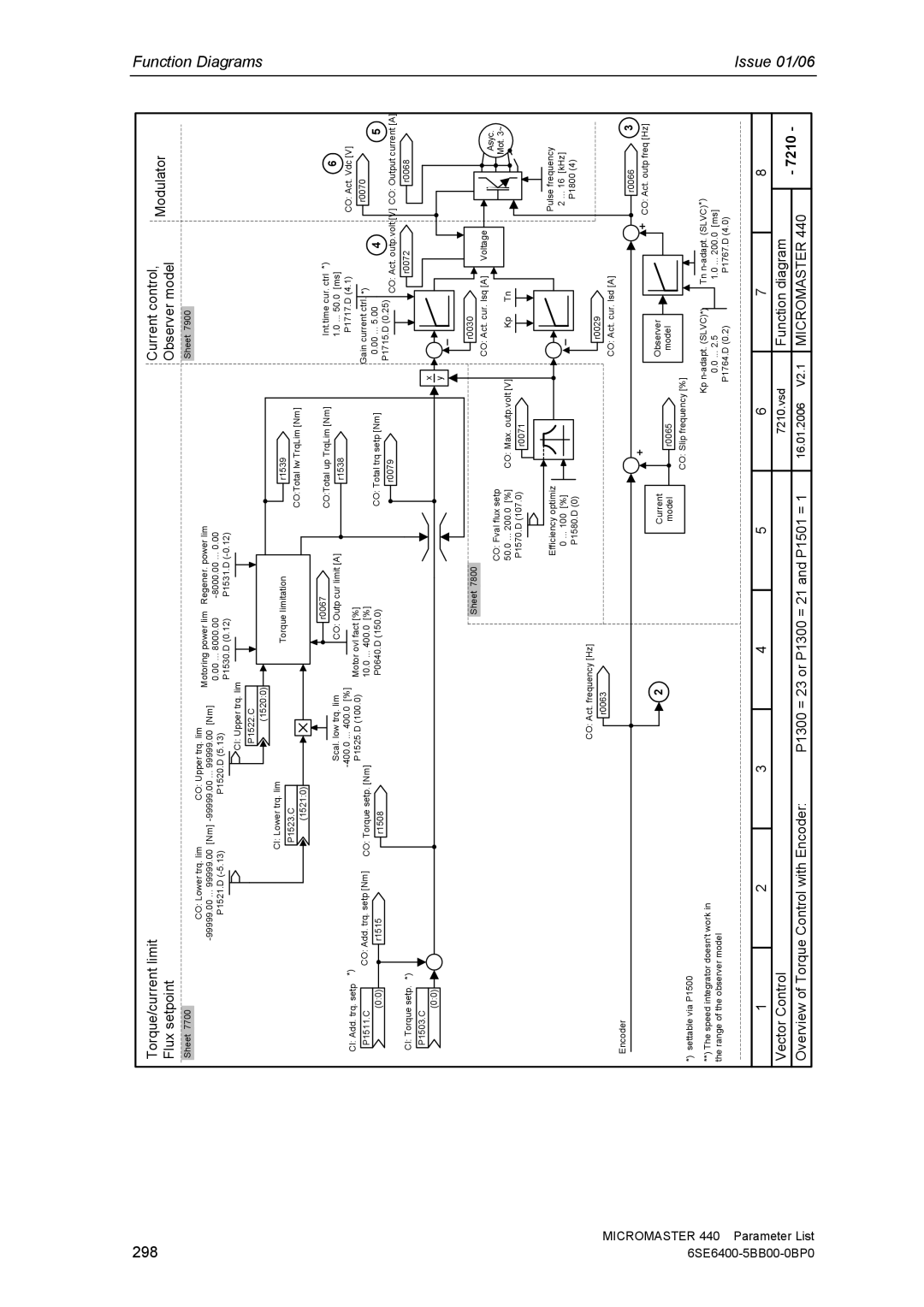
Torque/current limit |
|
|
| Current control, | Modulator | ||||
Flux setpoint |
|
|
| Observer model | |||||
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
Sheet | 7700 | CO: Lower trq. lim | CO: Upper trq. lim |
| Sheet | 7900 |
| ||
|
| Motoring power lim | Regener. power lim |
| |||||
|
|
| |||||||
|
| 0.00 ... 8000.00 |
|
|
|
| |||
|
| P1521.D | P1520.D (5.13) |
|
|
|
| ||
|
| P1530.D (0.12) | P1531.D |
| |||||
|
|
|
|
| |||||
CI: Upper trq. lim
|
| P1522.C |
|
|
|
|
|
|
|
|
| (1520:0) |
|
|
|
|
|
|
|
|
| CI: Lower trq. lim | Torque limitation |
| r1539 |
|
|
|
|
|
| P1523.C |
|
|
|
|
| ||
|
|
| CO:Total lw TrqLim [Nm] |
|
|
|
| ||
|
| (1521:0) |
|
|
|
|
| ||
|
|
|
|
|
|
|
|
| |
|
| Scal. low trq. lim | r0067 | CO:Total up TrqLim [Nm] | Int.time cur. ctrl | *) | 6 | ||
|
| CO: Outp cur limit [A] | r1538 | 1.0 ... 50.0 [ms] |
| ||||
CI: Add. trq. setp | *) |
|
| P1717.D (4.1) |
| CO: Act. Vdc [V] | |||
Motor ovl fact [%] |
|
|
| ||||||
P1525.D (100.0) |
|
| Gain current ctrl. *) |
| r0070 | ||||
P1511.C | CO: Add. trq. setp [Nm] | CO: Torque setp. [Nm] | 10.0 ... 400.0 [%] |
|
|
| |||
(0:0) | r1515 | r1508 | P0640.D (150.0) | CO: Total trq setp [Nm] | 0.00 ... 5.00 |
| 4 | 5 | |
|
|
|
|
| r0079 | P1715.D (0.25) CO: Act. outp.volt [V] CO: Output current [A] | |||
CI: Torque setp. *) |
|
|
|
|
| r0072 | r0068 | ||
P1503.C |
|
|
|
| x |
|
|
|
|
(0:0) |
|
|
|
|
|
|
|
| |
|
|
|
| y | – |
|
|
| |
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
| |
|
|
| Sheet 7800 |
|
| r0030 |
|
|
|
|
|
|
|
| CO: Act. cur. Isq [A] | Voltage |
| ||
|
|
|
|
|
| Asyc. | |||
|
|
|
| CO: Fval flux setp |
|
|
|
| |
|
|
|
| CO: Max. outp.volt [V] |
|
|
| Mot. 3~ | |
|
|
|
| 50.0 ... 200.0 [%] | Kp | Tn |
| ||
|
|
|
|
|
| ||||
|
|
|
| P1570.D (107.0) | r0071 |
|
|
|
|
|
|
|
| Efficiency optimiz |
| – |
| Pulse frequency |
|
|
|
|
| 0 ... 100 [%] |
|
| 2 ... 16 [kHz] |
| |
|
|
|
| P1580.D (0) |
|
|
| P1800 (4) |
|
|
|
| CO: Act. frequency [Hz] |
|
| r0029 |
|
|
|
|
|
| r0063 |
|
|
|
|
| |
|
|
|
|
| CO: Act. cur. Isd [A] |
|
| ||
Encoder |
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| r0066 | 3 | |
|
|
|
|
| + |
|
| ||
|
|
| 2 |
|
| + CO: Act. outp freq [Hz] | |||
|
|
| Current |
| Observer |
|
|
| |
|
|
|
| model | r0065 | model |
|
|
|
*) settable via P1500 |
|
|
|
| CO: Slip frequency [%] |
|
|
| |
|
|
|
|
|
|
|
|
| |
**) The speed integrator doesn't work in |
|
|
|
| Kp | Tn |
| ||
|
|
|
|
| 0.0 ... 2.5 | 1.0 ... 200.0 [ms] |
| ||
the range of the observer model |
|
|
|
|
|
| |||
|
|
|
|
| P1764.D (0.2) | P1767.D (4.0) |
|
| |
|
|
|
|
|
|
|
| ||
1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 |
|
Vector Control |
|
|
|
| 7210.vsd | Function diagram | - 7210 - | ||
Overview of Torque Control with Encoder: |
| P1300 = 23 or P1300 = 21 and P1501 = 1 | 16.01.2006 | V2.1 MICROMASTER 440 | |||||
|
|
| |||||||