Issue 01/06 |
|
|
|
| Parameter Description | ||
|
|
|
|
|
| ||
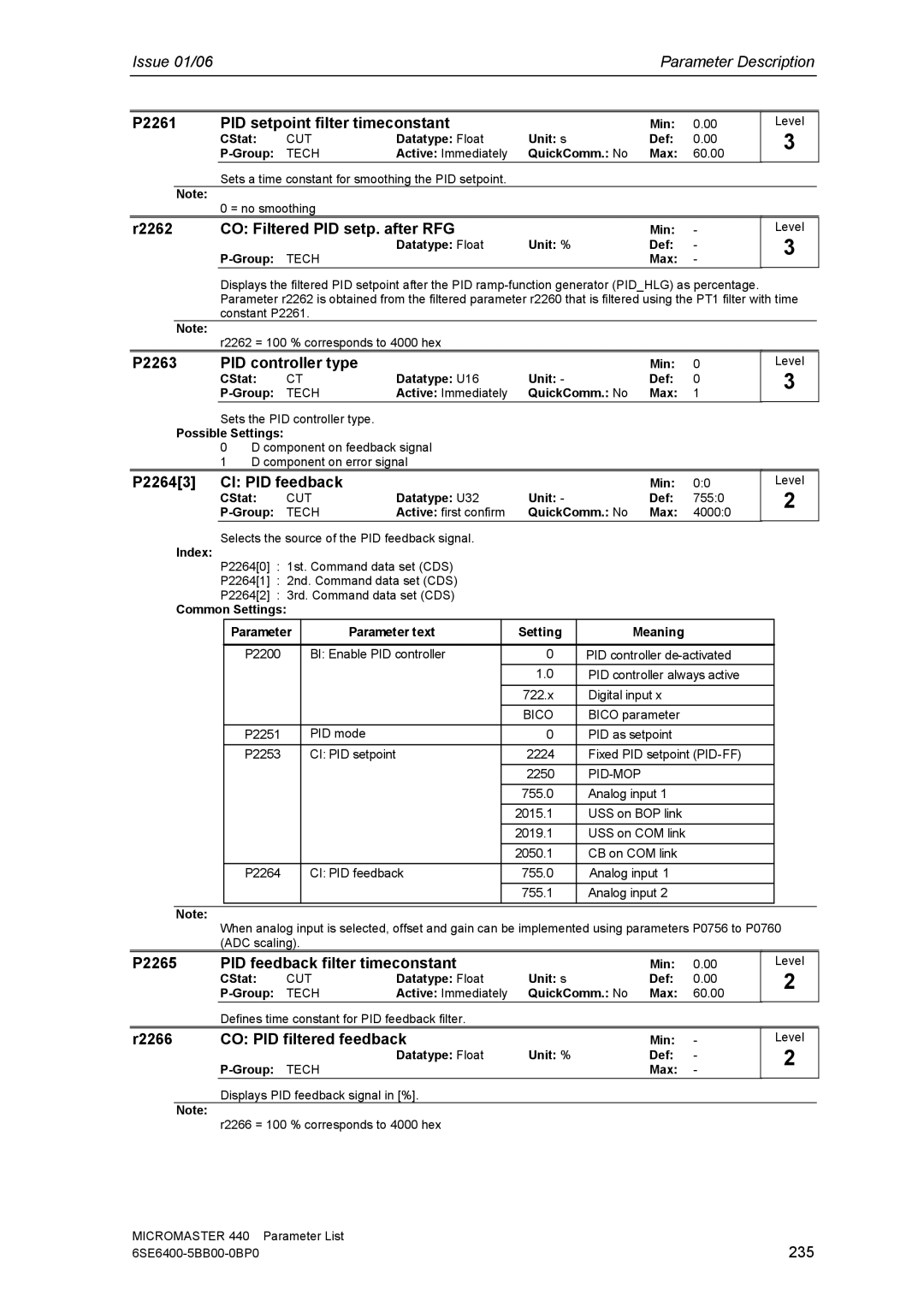
P2261 | PID setpoint filter timeconstant |
| Min: | 0.00 | Level | ||
| CStat: | CUT | Datatype: Float | Unit: s | Def: | 0.00 | 3 |
|
| ||||||
| TECH | Active: Immediately | QuickComm.: No | Max: | 60.00 |
| |
Sets a time constant for smoothing the PID setpoint.
Note:
0 = no smoothing
r2262 | CO: Filtered PID setp. after RFG |
| Min: | - |
| Datatype: Float | Unit: % | Def: | - |
|
| Max: | - |
Level
3
Displays the filtered PID setpoint after the PID
Note:
r2262 = 100 % corresponds to 4000 hex
P2263 | PID controller type |
|
| Min: | 0 | |
| CStat: | CT | Datatype: U16 | Unit: - | Def: | 0 |
| TECH | Active: Immediately | QuickComm.: No | Max: | 1 | |
Sets the PID controller type.
Possible Settings:
0D component on feedback signal
1D component on error signal
Level
3
P2264[3] CI: PID feedback |
|
| Min: | 0:0 | |
CStat: | CUT | Datatype: U32 | Unit: - | Def: | 755:0 |
TECH | Active: first confirm | QuickComm.: No | Max: | 4000:0 | |
Level
2
Selects the source of the PID feedback signal.
Index:
P2264[0] : 1st. Command data set (CDS)
P2264[1] : 2nd. Command data set (CDS)
P2264[2] : 3rd. Command data set (CDS)
Common Settings:
| Parameter | Parameter text | Setting | Meaning |
|
|
|
|
|
|
|
| P2200 | BI: Enable PID controller | 0 | PID controller |
|
|
|
| 1.0 | PID controller always active |
|
|
|
| 722.x | Digital input x |
|
|
|
| BICO | BICO parameter |
|
| P2251 | PID mode | 0 | PID as setpoint |
|
| P2253 | CI: PID setpoint | 2224 | Fixed PID setpoint |
|
|
|
| 2250 |
|
|
|
|
| 755.0 | Analog input 1 |
|
|
|
| 2015.1 | USS on BOP link |
|
|
|
| 2019.1 | USS on COM link |
|
|
|
| 2050.1 | CB on COM link |
|
| P2264 | CI: PID feedback | 755.0 | Analog input 1 |
|
|
|
| 755.1 | Analog input 2 |
|
|
|
|
|
|
|
Note:
When analog input is selected, offset and gain can be implemented using parameters P0756 to P0760 (ADC scaling).
P2265 | PID feedback filter timeconstant |
| Min: | 0.00 | ||
| CStat: | CUT | Datatype: Float | Unit: s | Def: | 0.00 |
| TECH | Active: Immediately | QuickComm.: No | Max: | 60.00 | |
Defines time constant for PID feedback filter.
Level
2
r2266 | CO: PID filtered feedback |
| Min: | - | Level |
| Datatype: Float | Unit: % | Def: | - | 2 |
|
| ||||
|
| Max: | - |
|
Displays PID feedback signal in [%].
Note:
r2266 = 100 % corresponds to 4000 hex
MICROMASTER 440 | Parameter List |
235 |