268
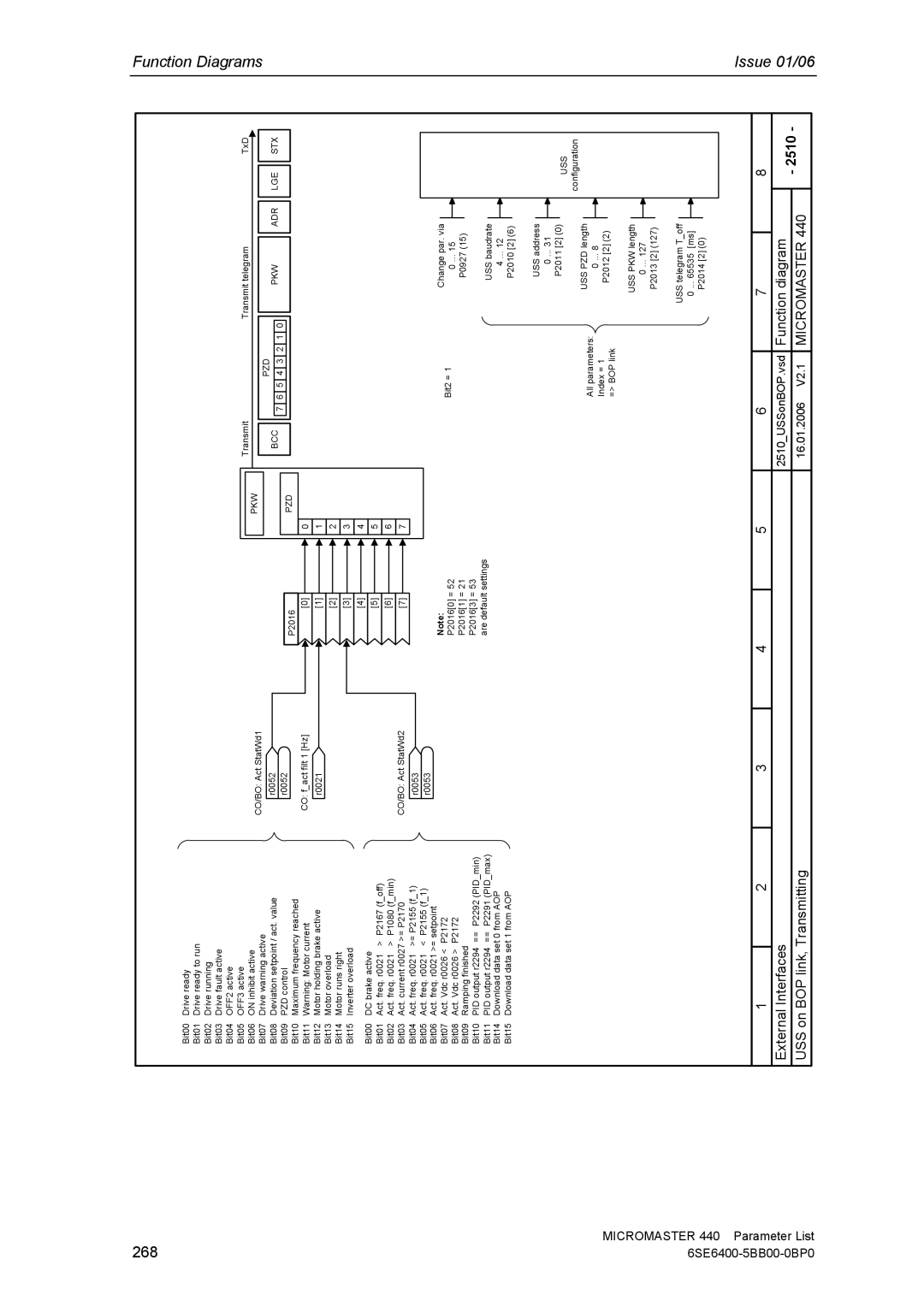
Bit00 | Drive ready |
|
|
Bit01 | Drive ready to run |
| |
Bit02 | Drive running |
|
|
Bit03 | Drive fault active |
|
|
Bit04 | OFF2 active |
|
|
Bit05 | OFF3 active |
|
|
Bit06 | ON inhibit active |
|
|
Bit07 | Drive warning active | ||
Bit08 | Deviation setpoint / act. value | ||
Bit09 | PZD control |
|
|
Bit10 | Maximum frequency reached | ||
Bit11 | Warning: Motor current | ||
Bit12 | Motor holding brake active | ||
Bit13 | Motor overload |
|
|
Bit14 | Motor runs right |
|
|
Bit15 | Inverter overload |
|
|
Bit00 | DC brake active |
|
|
Bit01 | Act. freq. r0021 | > | P2167 (f_off) |
Bit02 | Act. freq. r0021 | > | P1080 (f_min) |
Bit03 | Act. current r0027 >= P2170 | ||
Bit04 | Act. freq. r0021 | >= P2155 (f_1) | |
Bit05 | Act. freq. r0021 | < | P2155 (f_1) |
Bit06 | Act. freq. r0021 >= setpoint | ||
CO/BO: Act StatWd1
r0052
r0052
CO: f_act filt 1 [Hz] r0021
CO/BO: Act StatWd2
r0053
r0053
P2016
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
PKW
PZD
0
1
2
3
4
5
6
7
Transmit |
|
|
|
|
|
|
|
|
| Transmit telegram |
|
|
|
| TxD |
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| BCC |
|
|
|
|
| PZD |
|
|
|
|
| PKW |
| ADR |
| LGE |
| STX |
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Function Diagrams
MICROMASTER 440 6SE6400
Bit07 | Act. Vdc r0026 < P2172 |
| |
Bit08 | Act. Vdc r0026 > P2172 |
| |
Bit09 | Ramping finished |
|
|
Bit10 | PID output r2294 | == P2292 | (PID_min) |
Bit11 | PID output r2294 | == P2291 | (PID_max) |
Bit14 | Download data set 0 from AOP | ||
Bit15 | Download data set 1 from AOP | ||
Note: P2016[0] = 52 P2016[1] = 21 P2016[3] = 53 are default settings
Change par. via
Bit2 = 10 ... 15 P0927 (15)
USS baudrate
4 ... 12
P2010 [2] (6)
USS address
0 ... 31
P2011 [2] (0)
All parameters: | USS PZD length | |
0 ... 8 | ||
Index = 1 | ||
P2012 [2] (2) | ||
=> BOP link | ||
| ||
|
|
USS PKW length
0 ... 127
P2013 [2] (127)
USS telegram T_off
0 ... 65535 [ms]
P2014 [2] (0)
USS
configuration
Parameter List
1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 |
External Interfaces |
|
|
|
| 2510_USSonBOP.vsd | Function diagram |
| - 2510 - |
USS on BOP link, Transmitting |
|
|
| 16.01.2006 V2.1 | MICROMASTER 440 | |||
|
|
|
| |||||