Issue 01/06 | Parameter Description |
P2274 | PID derivative time |
|
| Min: | 0.000 | |
| CStat: | CUT | Datatype: Float | Unit: s | Def: | 0.000 |
| TECH | Active: Immediately | QuickComm.: No | Max: | 60.000 | |
Sets PID derivative time.
Level
2
P2274 = 0:
The derivative term does not have any effect (it applies a gain of 1).
P2280 | PID proportional gain |
|
| Min: | 0.000 | |
| CStat: | CUT | Datatype: Float | Unit: - | Def: | 3.000 |
| TECH | Active: Immediately | QuickComm.: No | Max: | 65.000 | |
Level
2
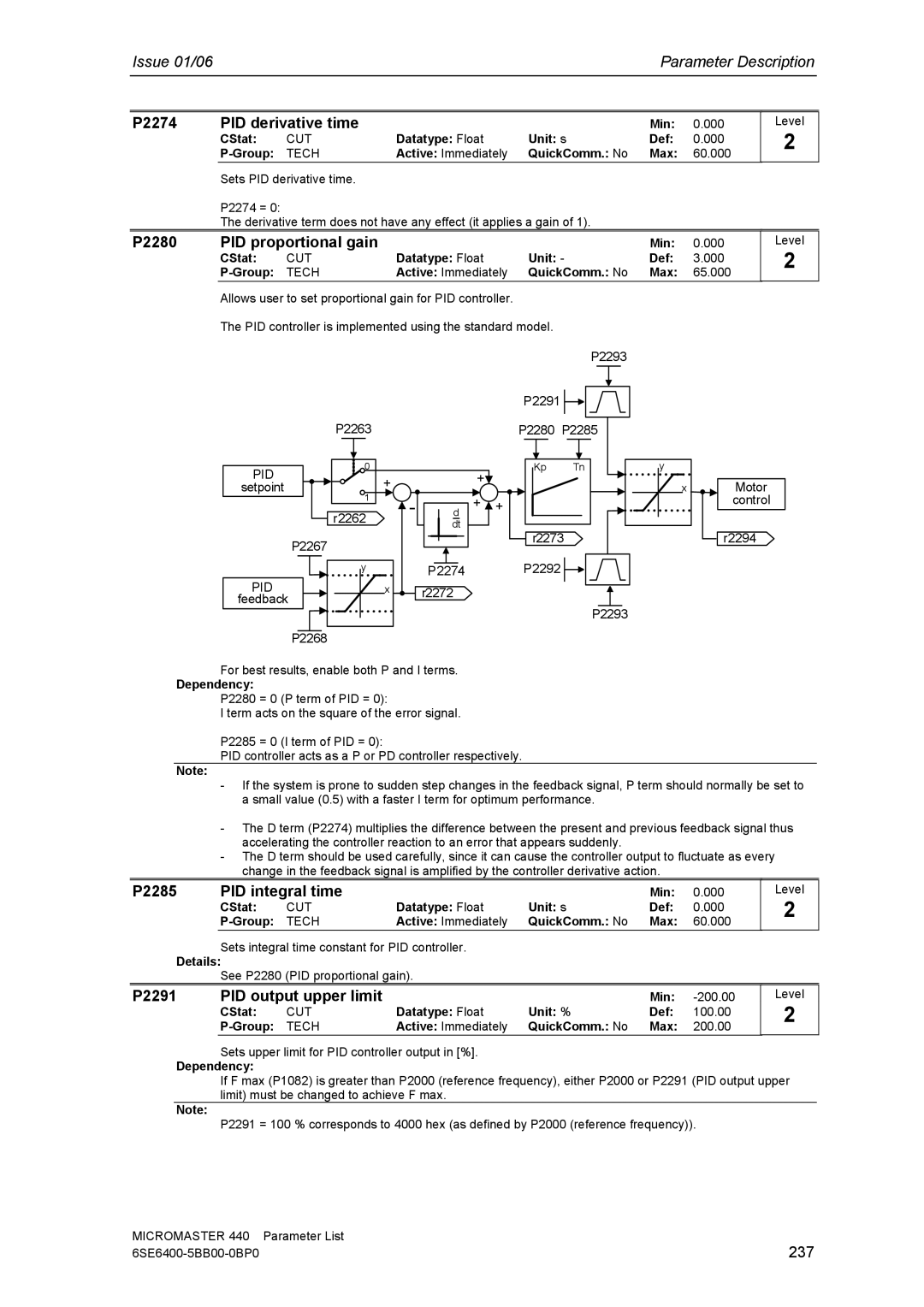
Allows user to set proportional gain for PID controller.
The PID controller is implemented using the standard model.
P2293
PID setpoint
P2267
P2263 |
|
|
|
|
0 |
|
| + |
|
| + |
|
| |
1 |
|
|
| |
- |
| + | + | |
r2262 | d | |||
| dt |
|
| |
|
|
|
|
P2291 ![]()
P2280 P2285
Kp | Tn |
r2273 |
|
y |
x |
Motor control
r2294
PID feedback
y | P2274 |
x | r2272 |
P2292 ![]()
P2293
P2268
For best results, enable both P and I terms.
Dependency:
P2280 = 0 (P term of PID = 0):
I term acts on the square of the error signal.
P2285 = 0 (I term of PID = 0):
PID controller acts as a P or PD controller respectively.
Note:
-If the system is prone to sudden step changes in the feedback signal, P term should normally be set to a small value (0.5) with a faster I term for optimum performance.
-The D term (P2274) multiplies the difference between the present and previous feedback signal thus accelerating the controller reaction to an error that appears suddenly.
-The D term should be used carefully, since it can cause the controller output to fluctuate as every change in the feedback signal is amplified by the controller derivative action.
P2285 | PID integral time |
|
| Min: | 0.000 | |
| CStat: | CUT | Datatype: Float | Unit: s | Def: | 0.000 |
| TECH | Active: Immediately | QuickComm.: No | Max: | 60.000 | |
Sets integral time constant for PID controller.
Details:
See P2280 (PID proportional gain).
Level
2
P2291 | PID output upper limit |
|
| Min: | ||
| CStat: | CUT | Datatype: Float | Unit: % | Def: | 100.00 |
| TECH | Active: Immediately | QuickComm.: No | Max: | 200.00 | |
Level
2
Sets upper limit for PID controller output in [%].
Dependency:
If F max (P1082) is greater than P2000 (reference frequency), either P2000 or P2291 (PID output upper limit) must be changed to achieve F max.
Note:
P2291 = 100 % corresponds to 4000 hex (as defined by P2000 (reference frequency)).
MICROMASTER 440 | Parameter List |
237 |