Issue 01/06 | Parameter Description |
P1202[3] |
| Min: | 10 | ||
CStat: | CUT | Datatype: U16 | Unit: % | Def: | 100 |
| FUNC | Active: first confirm | QuickComm.: No | Max: | 200 |
Level
3
Defines search current used for flying start. Value is in [%] based on rated motor current (P0305).
Index:
P1202[0] : 1st. Drive data set (DDS)
P1202[1] : 2nd. Drive data set (DDS)
P1202[2] : 3rd. Drive data set (DDS)
Note:
-If the search current is reduced, the flying restart behavior can be improved if the system inertia is not very high.
-The search algorithm for the flying restart is different for V/f control and
-This is the reason that, depending on the control technique, parameter P1202 must be appropriately adapted.
-Values gained from experience indicate that good results can be achieved by
-Increasing P1202 for V/f controls
-Reducing P1202 for
P1203[3] Search rate: Flying start |
| Min: | 10 | ||
CStat: | CUT | Datatype: U16 | Unit: % | Def: | 100 |
FUNC | Active: first confirm | QuickComm.: No | Max: | 200 | |
Level
3
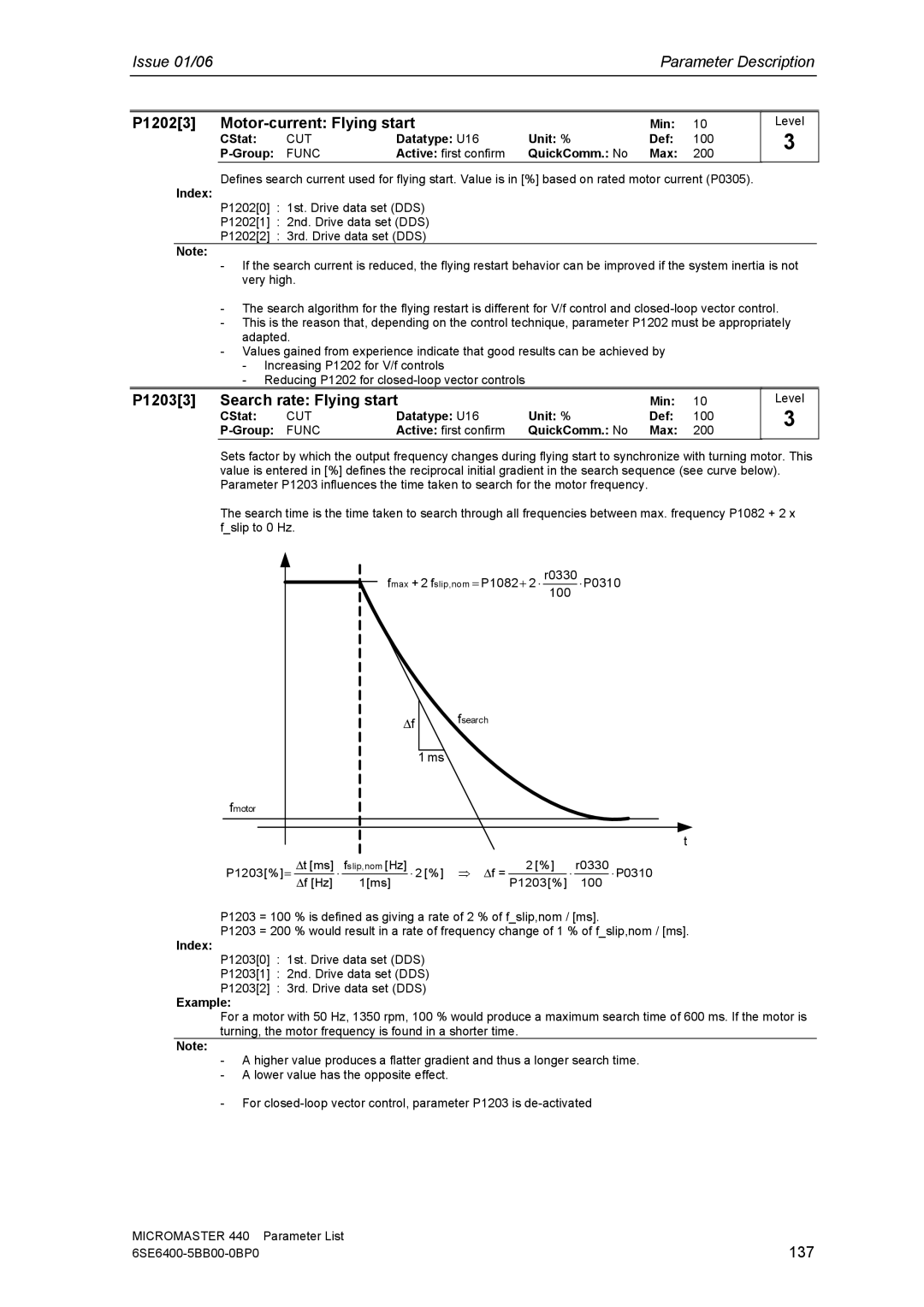
Sets factor by which the output frequency changes during flying start to synchronize with turning motor. This value is entered in [%] defines the reciprocal initial gradient in the search sequence (see curve below). Parameter P1203 influences the time taken to search for the motor frequency.
The search time is the time taken to search through all frequencies between max. frequency P1082 + 2 x f_slip to 0 Hz.
fmotor
fmax + 2 fslip,nom = P1082+ 2 ⋅ r0330100 ⋅ P0310
∆ | f | fsearch |
|
1 ms
t
P1203[%]= | ∆ t [ms] | ⋅ | fslip,nom [Hz] | ⋅ 2 [%] ⇒ ∆ f = | 2 [%] |
| ⋅ | r0330 | ⋅ P0310 | |
∆ f [Hz] | 1[ms] | P1203[%] | 100 | |||||||
|
|
|
|
| ||||||
P1203 = 100 % is defined as giving a rate of 2 % of f_slip,nom / [ms].
P1203 = 200 % would result in a rate of frequency change of 1 % of f_slip,nom / [ms].
Index:
P1203[0] : 1st. Drive data set (DDS)
P1203[1] : 2nd. Drive data set (DDS)
P1203[2] : 3rd. Drive data set (DDS)
Example:
For a motor with 50 Hz, 1350 rpm, 100 % would produce a maximum search time of 600 ms. If the motor is turning, the motor frequency is found in a shorter time.
Note:
-A higher value produces a flatter gradient and thus a longer search time.
-A lower value has the opposite effect.
-For
MICROMASTER 440 | Parameter List |
137 |