Issue 01/06 | Parameter Description |
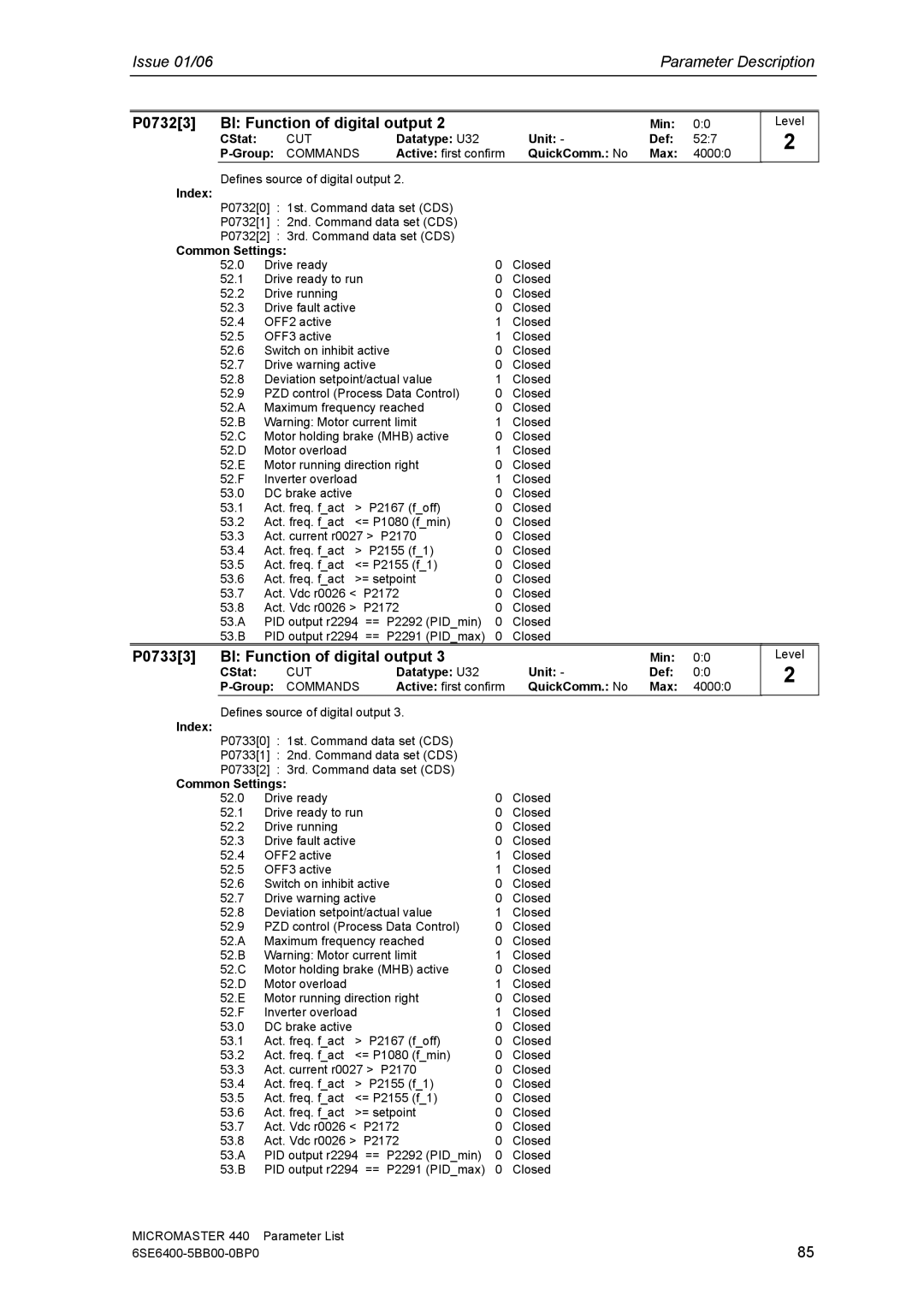
P0732[3] | BI: Function of digital output 2 |
|
| Min: | 0:0 | |||
| CStat: | CUT |
| Datatype: U32 |
| Unit: - | Def: | 52:7 |
| Active: first confirm | QuickComm.: No | Max: | 4000:0 | ||||
Index: | Defines source of digital output 2. |
|
|
|
| |||
P0732[0] : 1st. Command data set (CDS) |
|
|
|
| ||||
|
|
|
|
| ||||
| P0732[1] : 2nd. Command data set (CDS) |
|
|
|
| |||
| P0732[2] : 3rd. Command data set (CDS) |
|
|
|
| |||
Common Settings: |
|
|
|
|
|
| ||
| 52.0 | Drive ready |
|
| 0 | Closed |
|
|
| 52.1 | Drive ready to run |
| 0 | Closed |
|
| |
| 52.2 | Drive running |
|
| 0 | Closed |
|
|
| 52.3 | Drive fault active |
| 0 | Closed |
|
| |
| 52.4 | OFF2 active |
|
| 1 | Closed |
|
|
| 52.5 | OFF3 active |
|
| 1 | Closed |
|
|
| 52.6 | Switch on inhibit active | 0 | Closed |
|
| ||
| 52.7 | Drive warning active | 0 | Closed |
|
| ||
| 52.8 | Deviation setpoint/actual value | 1 | Closed |
|
| ||
| 52.9 | PZD control (Process Data Control) | 0 | Closed |
|
| ||
| 52.A | Maximum frequency reached | 0 | Closed |
|
| ||
| 52.B | Warning: Motor current limit | 1 | Closed |
|
| ||
| 52.C | Motor holding brake (MHB) active | 0 | Closed |
|
| ||
| 52.D | Motor overload |
|
| 1 | Closed |
|
|
| 52.E | Motor running direction right | 0 | Closed |
|
| ||
| 52.F | Inverter overload |
| 1 | Closed |
|
| |
| 53.0 | DC brake active |
|
| 0 | Closed |
|
|
| 53.1 | Act. freq. f_act | > | P2167 (f_off) | 0 | Closed |
|
|
| 53.2 | Act. freq. f_act | <= P1080 (f_min) | 0 | Closed |
|
| |
| 53.3 | Act. current r0027 > P2170 | 0 | Closed |
|
| ||
| 53.4 | Act. freq. f_act | > | P2155 (f_1) | 0 | Closed |
|
|
| 53.5 | Act. freq. f_act | <= P2155 (f_1) | 0 | Closed |
|
| |
| 53.6 | Act. freq. f_act | >= setpoint | 0 | Closed |
|
| |
| 53.7 | Act. Vdc r0026 < P2172 | 0 | Closed |
|
| ||
| 53.8 | Act. Vdc r0026 > P2172 | 0 | Closed |
|
| ||
| 53.A | PID output r2294 == P2292 (PID_min) | 0 | Closed |
|
| ||
| 53.B | PID output r2294 == P2291 (PID_max) | 0 | Closed |
|
| ||
Level
2
P0733[3] | BI: Function of digital output 3 |
|
| Min: | 0:0 | |||
| CStat: | CUT |
| Datatype: U32 |
| Unit: - | Def: | 0:0 |
|
| Active: first confirm | QuickComm.: No | Max: | 4000:0 | |||
Index: | Defines source of digital output 3. |
|
|
|
| |||
P0733[0] : 1st. Command data set (CDS) |
|
|
|
| ||||
|
|
|
|
| ||||
| P0733[1] : 2nd. Command data set (CDS) |
|
|
|
| |||
| P0733[2] : 3rd. Command data set (CDS) |
|
|
|
| |||
Common Settings: |
|
|
|
|
|
| ||
| 52.0 | Drive ready |
|
| 0 | Closed |
|
|
| 52.1 | Drive ready to run |
| 0 | Closed |
|
| |
| 52.2 | Drive running |
|
| 0 | Closed |
|
|
| 52.3 | Drive fault active |
| 0 | Closed |
|
| |
| 52.4 | OFF2 active |
|
| 1 | Closed |
|
|
| 52.5 | OFF3 active |
|
| 1 | Closed |
|
|
| 52.6 | Switch on inhibit active | 0 | Closed |
|
| ||
| 52.7 | Drive warning active | 0 | Closed |
|
| ||
| 52.8 | Deviation setpoint/actual value | 1 | Closed |
|
| ||
| 52.9 | PZD control (Process Data Control) | 0 | Closed |
|
| ||
| 52.A | Maximum frequency reached | 0 | Closed |
|
| ||
| 52.B | Warning: Motor current limit | 1 | Closed |
|
| ||
| 52.C | Motor holding brake (MHB) active | 0 | Closed |
|
| ||
| 52.D | Motor overload |
|
| 1 | Closed |
|
|
| 52.E | Motor running direction right | 0 | Closed |
|
| ||
| 52.F | Inverter overload |
| 1 | Closed |
|
| |
| 53.0 | DC brake active |
|
| 0 | Closed |
|
|
| 53.1 | Act. freq. f_act | > | P2167 (f_off) | 0 | Closed |
|
|
| 53.2 | Act. freq. f_act | <= P1080 (f_min) | 0 | Closed |
|
| |
| 53.3 | Act. current r0027 > P2170 | 0 | Closed |
|
| ||
| 53.4 | Act. freq. f_act | > | P2155 (f_1) | 0 | Closed |
|
|
| 53.5 | Act. freq. f_act | <= P2155 (f_1) | 0 | Closed |
|
| |
| 53.6 | Act. freq. f_act | >= setpoint | 0 | Closed |
|
| |
| 53.7 | Act. Vdc r0026 < P2172 | 0 | Closed |
|
| ||
| 53.8 | Act. Vdc r0026 > P2172 | 0 | Closed |
|
| ||
| 53.A | PID output r2294 == P2292 (PID_min) | 0 | Closed |
|
| ||
| 53.B | PID output r2294 == P2291 (PID_max) | 0 | Closed |
|
| ||
MICROMASTER 440 | Parameter List |
|
|
|
|
|
| |
|
|
|
|
|
|
| ||
Level
2
85