Flexible Motion Controller
FQM1 Series
Page
Omron Product References
Omron
Page
Table of Contents
Coordinator Module Functions 123
Inspection and Maintenance 259
Table of Contents
Name Cat. No Contents
About this Manual
Xii
Precautions
Intended Audience
General Precautions
Safety Precautions
Operating Environment Precautions
Safety Precautions
Application Precautions
Xvii
Xviii
Concepts
Conformance to EC Directives
Applicable Directives
Conformance to EC Directives
Countermeasures
Current Characteristic Required element
Relay Output Noise Reduction Methods
Countermeasure Examples
Circuit Current Characteristic Required element
Name Model Cable length
Temperature Initial After 5 years After 10 years
Data Backup
Module Data Data backup
Charge the capacitor
Backing Up DM Area Data in Flash Memory
Xxiv
Section
Outline of FQM1 Flexible Motion Controller
Section
Special I/O Servo Driver Pulse or Analog I/O Basic I/O
FQM1 Configuration
CJ1W-PA205R
FQM1-MMP21
FQM1-MMA21
Modules
Details
Outline of Internal Data Exchange and I/O
PLC
CX-Programmer
CX-Programmer
Serial Communications
Expanded System Configuration
System Configuration
Systems
Host Link System
Yes See note
Connection between CJ1M and FQM1 Controller
Serial Gateway
1N Connection between CJ1M and FQM1 Controllers
FQM1
Basic Operating Procedure
No-protocol Custom Communications System via RS-422A Port
Output wiring
Input wiring
Examples
Installation
Wiring Initial Hardware Settings
Writing the Programs
Transferring the Programs Testing Operation
Data Tracing
Time Chart Monitoring
Save and Print the Programs
Online Editing
Function Tables Arranged by Purpose
Purpose Operation Function used Details
Function Tables Arranged by Purpose
Position and Speed Control
Purpose Operation Main functions Details Used
Absolute Encoders
Analog Outputs
Pulse Output Function Procedures
Measuring Input Pulses
Analog Input Function Specifications
High-speed Analog I/O Control
Pulse Outputs
Input Interrupt Mode
Controlling Timing
Time Measurement with the Pulse
Section
Specifications and Nomenclature
Must be installed
General Specifications
General Specifications
Name Type Model Specifications
Power Supply Unit Specifications
VA max Inrush current At 100 to 120 V AC See note
Coordinator Module
Indicators
Indicator Color Name Status Meaning
Nomenclature
Peripheral Port Baud Rate Detection/System Setup Switch
Function Specifications
Switch on Front Panel
Bits TR0 to TR15
Motion Control Module
Specifications
Motion Control Modules
Built-in General-purpose I/O
MMP21
FQM1-MMA21 Analog I/O
OUT7
MMA21
Performance Specifications
MMP21
Specifications
Pulse I/O Specifications FQM1-MMP21 Pulse I/O
CW/CCW
Pulse Inputs and Analog FQM1-MMA21 Analog I/O Specifications
FQM1-TER01 End Module
Dimensions
FQM1-CM001 Coordinator Module
Power Supply Units CJ1W-PA202
Current Consumption for Each Module
Maximum Current Maximum Total Power Consumption
Module Current Consumption
XW2B-80J7-1A Servo Relay Unit
Motion Control Modules
Example Calculation Current and Power Consumption
Combining Power Supply Units Motion Control Modules
Current Consumption for 24-V Systems
Areas Backed Up by Super Capacitors
Memory Block Diagram
Motion Control Modules
Areas Backed Up to Flash Memory
Section
Installation and Wiring
Temperature Control
Installation
Installation and Wiring Precautions
Accessibility for Operation and Maintenance
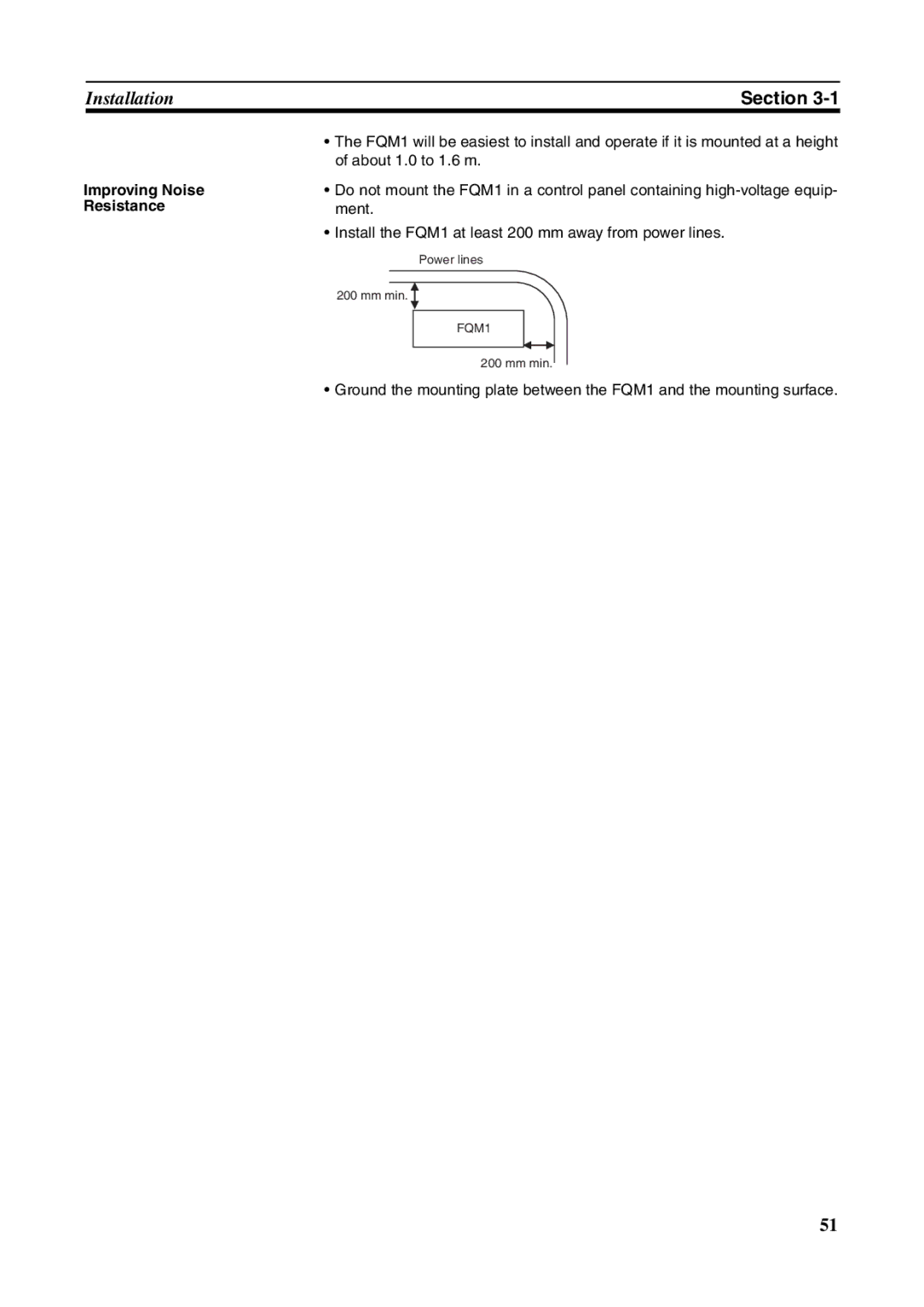
Improving Noise Resistance
Ing
Do not install the FQM1 in any of the following positions
FQM1 Orientation
FQM1 must be mounted inside a control panel on DIN Track
Installation in a Control Panel
Wiring Ducts
Terminal Screws M4 1.2 N·m M3 0.5 N·m
PLC FQM1
Assembled Appearance and Dimensions
Routing Wiring Ducts
Coordinator Module width 49 mm
Assembled Dimensions
Installation Dimensions
Motion Control Module width 49 mm
Connecting FQM1 Components
Installation Height
DIN Track Installation
Lock the pins on the backs of the Modules
PFP-100N2 DIN Track
DIN Track and Accessories
DIN Track
PFP-100N/50N DIN Track
AC Power Source
Wiring
Wiring Power Supply Units
Power Supply Capacity
Crimp Terminals
Grounding
Terminal Screws
FQM1
Crimp Terminals for Ground Wire
Connector Pin Arrangement
2 RS-232C Port Wiring
WiringSection
Connection Methods
IBM PC/AT or Compatible Connector 9-pin, Male
Peripheral Bus Toolbus Serial Communications Mode
Applicable Connectors Coordinator Module Connector
Connecting to an IBM PC/AT or Compatible
Connection Example to Programmable Terminal PT
RS-232C Port Specifications
Specification
Direct Connection from RS-232C to RS-232C
General-purpose I/O 40-pin Connector
Wiring Module Connectors
Connector Pin Arrangement
FQM1-CM001 Coordinator Module
FQM1-MM@21 Motion Control Modules
General-purpose I/O 26-pin Connector
FQM1-MMP21 Pulse I/O 40-pin Connector
Pin No Name
FQM1-MMA21 Analog I/O 40-pin Connector
Pin Name
Are outlined in the following tables
External Connection Diagrams
Input between 4 and 20 mA
Pulse Outputs
Example
Wiring Examples
Connecting Pulse Inputs FQM1-MMP21 MMA21
Power supply Encoder
Connecting Pulse Outputs FQM1-MMP21
FQM1-MMP21
Connecting Analog Inputs FQM1-MMA21
Wiring Methods
Connecting Analog Outputs FQM1 MMA21
Connectors
Recommended Wire Size
Wiring Servo Relay Units
Applicable Connector-Terminal Block Conversion Units
Nomenclature and Functions
RS-422 Connector
Pin No Signal
Upper Terminal Block Pin Arrangement
Lower Terminal Block Pin Arrangement
Signal Switches
Switch Setting details
Wiring Method
External Dimensions
Wiring Screw-less Clamp Terminal Blocks
Following screwdriver can be used when removing wires
Phoenix Contact Inc
Recommended Screwdriver
Model Manufacturer
Wiring when Using Servo Relay Units
Sysmac PLC
Lower Terminal Block Arrangement
Example Servo Relay Unit Wiring
Upper Terminal Block Arrangement
Specifications Model
List of FQM1 Connecting Cables
Connecting Cable Models
RS-422A Connecting Cables with 9-pin D-sub Connector
Reducing Electrical Noise
Wiring Precautions
Signal Wiring
Inductive Loads
External Wiring
Surge suppressor specifications Diode specifications
OUT
COM +
Connecting I/O Devices
Input Devices
Precautions when Connecting a Two-wire DC Sensor
VON ≤ VCC VR
Transistor Output
Output Wiring Precautions
Output Short-circuit Protection
Residual Voltage
Reduce the surge current
Add a control resistor as shown in the following diagram
Output Surge Current
Method
Operation
Memory
Outline
User Program
System Setup Flash Memory
Coordinator Module Operation
Startup Initialization
Servicing Contents
3 I/O Refreshing and Peripheral Servicing
Refreshing
Description of Each Area
User Program Area
Tab Settings
Memory System Setup Read/Write DM Area D00000 to D32767
System Setup Using CX-Programmer
Motion Control Module Operation
Scan or at the specified sync cycle time. See note
Sync Mode Operation
Same time
Ules. Refer to 5-4 Synchronous Data Refresh for details
Program
Operating Modes
Following tables list status and operations for each mode
Mode Cyclic task status Interrupt task status
Operating Modes
Power OFF Operation
Power OFF Operation
Operating Mode Changes and I/O Memory
Mode Changes Cleared areas Retained areas
User-set Power OFF Detection Time
Power OFF Timing Chart
Fixed Power OFF Detection Time
Power Holding Time
Instruction Execution for Power Interruptions
Description of Operation
Module Functions and Data Exchange
Synchronous Operation between Modules
Sync Mode
ASync Mode
Sync and ASync Modes
Data Exchange between Modules
Method Outline Description
Cyclic Refresh
Applications
Motion Control Module Cyclic Refresh Areas
Cyclic Refresh Area Details
Coordinator Module Cyclic Refresh Area
Word Bits Details Address
Bits Details
Cyclic Refresh Area Allocations
CM Coordinator Module MM Motion Control Module
Bit
Synchronous Data
Synchronous Data Refresh
Sync Cycle Time
Ladder execution results data
Input or analog output value in the System Setup
Synchronous Data Link Bit Area
Transfer time
Trol Modules
Settings
System Setup Coordinator Module
Synchronization between Modules
Prohibit System
System Setup Motion Control Modules
DM Data Transfer
Interruption of the Sync
Executing DM Data Transfer
Settings Details
Make Auxiliary Area Settings
Area
Turn on Request Bit Programming Example
Cycle Time Settings
Constant Cycle Time Function
Constant Cycle Time Exceeded Error Clear Bit
Constant Cycle Time Function in Sync Mode
System Setup
Constant Cycle Time Function Enabled for Coordinator Module
Cycle Time Too Long Flag
Watch Cycle Time Function
Cycle Time Monitoring Function
Auxiliary Area Words
Normal Operation
Clearing Constant Cycle Time Exceeded Errors
Constant Cycle Time Exceeded Error Clear Function
Auxiliary Area Bits
Tab Name Details Settings Default
Operation Settings at Startup and Maintenance Functions
Specifying the Startup Mode
Program Protection
Flash Memory
Automatic Backup to Flash Memory
Password Protection
Auxiliary Area Flags
Diagnostic Functions
Error Log
Name Address Meaning
Failure Alarm Functions
Operation of FAL006
Operation of FALS007
Coordinator Module Functions
Protocol Connections Description
Serial Communications
FQM1 supports the following serial communications functions
Peripheral 232C 422A
Serial Communications
FQM1. Select the method that best suits your application
Procedure
Host Link Communications
Host Link Commands
Type Header Name Function Code
Fins Commands
Type Command Name Function Code
No-protocol Communications RS-232C Port
Forced SET/RESET
Forced SET/RESET Cancel
CR+LF
CR+LF
End code setting Yes
Message Frame Formats
Setting Default Enabled
NT Link 1N Mode
System Setup RS-232C Settings Host Link Port Settings
On the TXD236 and RXD235 instructions
Ule are shared with the CJ1M master as shown below
Serial PLC Links
Overview
CIO 0080 to CIO 0089 CJ1M master to FQM1 slave
Source Words and Number of Link Words
CJ1M Master Settings
FQM1 Slave Settings
Settings
Function
Smartstep
Smart Active Parts Communications Settings
Settings Default Enabled
RS-422A Settings
No-protocol Communications RS-422A Port
Motion Control Module Functions
138
FQM1 Modules have the following functions
Overview
OverviewSection
Main function Sub-functions Applicable Modules
Interrupt Priority
Interrupt Functions
Overview
Executing Interrupt Programs
Disabling All Interrupts
DI802 instruction will disable all interrupts
Disabling and Enabling All Interrupts
Enabling All Interrupts
Applicable Models
Input Interrupt Specifications
Input Interrupts
Overview of the Input Interrupt Function
Input Interrupt Mode Procedure
Using Input Interrupts
Counter Mode
Input Allocated input bit Interrupt task number
Counter Mode Procedure
Application Example
Using Interval Timer Interrupts
Interval Timer Interrupts
Interval Timer Interrupt Modes
Equipped with one interval timer each
Stim Interval Timer
@STIM
Based on the counter PV
Specifications
Pulse Inputs
Model Functions
Pulse Inputs
Pulse Input Specifications
151
Applicable Instructions
Latch Input Specifications
Internal Circuit Configurations
Pulse Inputs
Pulse Input Function Description
High-speed Counter Function Description
Circular Counter
Reset Methods
Counter Operation Numeric Ranges
Linear Counter
Checking for High-speed Counter Interrupts
Phase-Z Signal Reset Input and Software Reset
Software Reset
Target-value Comparison Method
Range Comparison Method
Tab Function Details
Monitoring High-speed Counter Movement Mode
Word Bits Function Details
System Setup Function Details
Word Bit Function Details
Pulse Input Function Procedures
High-speed Counter Procedure
Mode 1 Procedure
Target-value comparison interrupt
Pulse Input Function Example Application
Mode 2 Procedure
Procedure
163
164
165
Example Latching High-speed Counter PV
Pulse Outputs
168
All Pulse Outputs Except for One-shot Pulse Outputs
One-shot Pulse Outputs
Sible is also listed in the following table
Instructions Ineffective during Pulse Output
Mode Description
Pulse Output Function Details
172
Pulse Output Operations
SPED88
PULS88
Set by user
Precautions when Using Pulse Outputs
Target frequency
Dividing ratio
Target frequency Hz Actual output frequency
One-shot Pulse Output Function
Formula
Word Bits Function Contents
One-shot Pulse Output Specifications
Tab Function Setting
Time Measurement with the Pulse Counter
Pulse Counter Timer Specifications
Target-value Comparison Interrupts from Pulse Output PVs
Linear Mode Operation
END ACC
Circular Mode Operation
Range Comparison Bit Pattern Outputs from Pulse Output PVs
Speed-change Cycle
12 PLS2887 Pulse Output Direction Priority Mode
Setting
Ms Cycle
Pulse Output Direction Priority Mode
Pulse Output Function Procedures
Setting the Pulse Output Direction Priority Mode
Execute PLS2887 with A628.14 OFF
Pulse Outputs with Acceleration/Deceleration
Pulse output port
Electronic Cam Control Functions
Port Pulse output port
187
Pulse Counter Timer Function STIM980
One-shot Pulse Output STIM980
Pulse Output Function Examples
@SPED
Changing the Frequency in Steps
Accelerating the Frequency at a Fixed Rate
Number of pulses is 0 or more
Speed
192
Using PLS2887 for Trapezoidal Acceleration/Deceleration
@PLS2
Pulse Output Starting Conditions
Pulse Counter Time Measurement Timer Example
Supports continuous mode only
One-shot Pulse Output Function Example
Use this function for positioning
CCW
PULS886 Absolute Pulse Output in Progress
SPED8 PULS8 PULS88
Target position Present position
Case
Absolute linear
Cases 6, 8, 9,
Cases 7, 11, 12
199
Data Format
Serial Data Specification
Data Format of Absolute Encoder Output
P is in ASCII. It is 50 hex in hexadecimal
Counter Operation
Counting Operation Counter Operation Details
Absolute Linear Counter Absolute Circular Counter
Absolute Number of Rotations PV Counter 1 A604 and A605
Absolute Present Value
7FFF
Absolute Present Value Preset
Absolute Offset Preset
Tab Function Details Time when Setting
Related Areas
Auxiliary Area
Word Bits Function Details Controlled
206
Output Data
Overview of Absolute Encoder Output Data Acquire
Absolute Encoder
Acquiring Method
208
Sample Programs Connecting an Omron W-series Servo Driver
Program Description
210
211
Virtual Pulse Output Function
Axis
Axis Instruction For Virtual Pulse Outputs
Mode Specifier Sets the output mode
First Word of Setting Table
Operands
Description
Motion Control Module for Analog I/O
Positioning or Speed Control Using a Virtual Axis
Analog Input Functions
FQM1-MMA21
Analog Input Function Specifications
Related Areas and Settings
Tab Function Settings Time when setting Becomes effective
Word Bits Function Settings Controlled
220
221
With END Refreshing With Immediate
Signal Range −10 to 10 Signal Range 0 to 10
6 A/D Conversion Value
High-speed Analog Sampling FQM1-MMA21 Only
Signal Range 1 to 5 V and 4 to 20 mA
Signal Range 0 to 5
Overview CTBL882 Instruction Operation
At several measurement points
Comparison Table
Analog Outputs
@CTBL
Analog Output Function Specifications
Analog Outputs
Condition Analog output
Overall accuracy is the ratio of accuracy to the full scale
CPU standby status
To 10
Specified Output Values and Analog Output Signals
END Refreshing With Immediate Refreshing
To 5
Procedure
Outputting a Sloped Analog Output
Outputting the Analog Output Value Stored Auxiliary Area
Outputting a Stepped Analog Output
231
232
Connecting the CX-Programmer
Cables shown in the following table
Make System Setup settings, and monitor or debug operation
Name Model Specifications
CS1W-CIF31
Connecting a Personal Computer Running Support Software
Connecting the CX-Programmer
System Configuration
Cable Connection Diagram
CS1W-CIF31
Connection Methods Using a USB-Serial Conversion Cable
CX-Programmer Connecting Cables
Cable Port Communic Connecting Ations Connector Model
Connecting an RS-232C Cable to the Peripheral Port
Connecting an RS-232C Cable to the RS-232C Port
When connecting the CX-Programmer to the FQM1
Serial Features Communications Mode
240
Error Processing
Error Log Structure
Error Log
Errors Generated by FAL006/FALS007
Instruction FAL numbers Error codes
Error Information
Error Processing
Error Categories
Indicator Status and Error Conditions
ERR OFF
Error Codes
Classification Error code Error name
Prphl OFF COMM1 COMM2
Error Processing Flowchart
Fatal Errors
Error Tables
CPU Errors
CPU Standby
247
Fatal Errors
C2FF
Non-fatal Errors
Non-fatal Errors
Lit Flashing
Other Errors
Power Supply Check
Memory Error Check
Program Error Check
Cycle Time Overrun Error Check
System Setup Error Check
11 I/O Setting Error Check
12 I/O Check
Error condition Probable cause Remedy
Troubleshooting Problems in Modules
Coordinator Module Errors
Environmental Conditions Check
Motion Control Module Errors
Input Errors
Output Errors
Inspection and Maintenance
Inspection Points for Periodic Inspections
Inspections
Inspection Points
Inspection Criteria Action
Required Tools
Module Replacement Precautions
Tools Required for Inspections
Tools Required
262
Type of task Description
Programming Programs and Tasks
Tasks
What Are Subroutines?
Using Normal Subroutines
Subroutines
Type of subroutine Description Calling instruction
Execution with Subroutine Input Condition Flags
Using Subroutines That Pass Parameters
Execution without Subroutine Input Condition Flags
Overview
JSB
JSB982 Operation
Address Corresponding subroutines Word Bits
RET
Appendix a
Mcro
Main Program
Basic Information on Instructions
Power Flow
Basic Information on Programming
Instruction Conditions
Flags
Instruction Description Setting Canceling Condition
Operand types Description Symbol
Operands
Bit Addresses
Instruction Location and Input Conditions
Addressing I/O Memory Areas
Word Addresses
Specifying Operands
Operand Description Notation Application
Operand Description Notation Application Examples
BCD
BCD
Data Operand Data form Symbol Range Application example
LD ,IR0
#FFFFFFFF
Abcd
Abcde
NUL
NUL NUL
Decimal Digit
Data Formats
Data type
Complements
Two’s Complements
Fffe
Decimal Hexadecimal Binary
Ffff
7FFF
Input Conditions
Variation Symbol Description
Instruction Variations
Non-differentiated Instructions
280
Condition Flags
Programming Precautions
Using Condition Flags
Using Execution Results in NC and no Inputs
CMP
Main Conditions Turning on Condition Flags
Using Execution Results from Differentiated Instructions
Error Flag
Difu
Less Than and Greater Than Flags
Equals Flag
Carry Flag
Negative Flag
Subroutines
Special Program Sections
Instruction Combinations
Program section Instructions Instruction condition Status
Instructions Not Allowed in Block Program Sections
Instructions Not Allowed in Subroutines
Instructions Not Allowed in Step Ladder Program Sections
Following instructions cannot be placed in a subroutine
YES
FQM1 Operation Flowchart
Computing the Cycle Time
Motion Control Modules
Overview of Cycle Time Calculations
Coordinator Module
Calculating the Cycle Time of the Coordinator Module
Sync Bus Refreshing
Peripheral Service
Calculating the Cycle Time of a Motion Control Module
Cyclic Refreshing
Cyclic Refresh Time in Motion Control Modules
Module I/O Refresh Times
Cyclic Refresh Time in the Coordinator Module
Model Refresh time
Conditions
Example of Calculating the Cycle Time
Online Editing Cycle Time Extension
Calculation Example for FQM1-MMP21
Coordinator Module I/O Response Time
Response Time
Response Time
Motion Control Module I/O Response Time
Minimum I/O Response Time General-purpose I/O 0 to
Response Time for Pulse and Analog I/O
Interrupt Response Times
Motion Control Module Interrupt Response Times
Input Interrupt Tasks
Motion Control Module Interrupt Processing Times
Scheduled Interrupt Task
Minimum Response Time
Processing Time
Interrupt Response Time Calculation Example
Maximum Response Time
298
Parameter Area
Memory Overview of I/O Memory
Introduction
CIO
Memory Structure
Coordinator Module
Motion Control Modules
CIO Area
Bit Area CIO 0000 and CIO
Serial PLC Link Bit Area CIO 0080 to CIO
Refresh
Synchronous Data Link Bit Area CIO 0200 to
END Refresh
Auxiliary Area A000 to A649 A000.00 to A649.15
Refreshing Using the IORF097 Instruction
Work Area W000 to W255 W000.00 to W255.15, 4,096 Bits
Temporary Relay Area TR
Timer Area
Counter Area
Appendix B
Binary-mode Addressing @D
Data Memory DM Area
Condition Flags
BCD-mode Addressing *D
Summary of the Condition Flags
Using the Condition Flags
Name CX-Programmer Function Symbol
Clock Pulses
Using the Clock Pulses
Name Label CX-Programmer Operation Symbol
System Setup
Parameter Area
Allow Writing to User Memory
System Setup in the Coordinator Module
Prohibit System Interrupt of the Sync Mode
Appendix C
Startup Mode Setting CX-Programmer Startup Tab
Cycle Time Settings CX-Programmer Timer/Peripheral Service
Peripheral Port Settings CX-Programmer Peripheral Port Tab
Peripheral Port Settings for Host Link
Standard/Customer Setting
Peripheral Port Settings for NT Link
Peripheral Port Settings for Peripheral Bus ToolBus
Host Link Unit Number
RS-232C Port Settings for Host Link
Format
RS-232C Port Settings for NT Link
RS-232C Port Settings for Peripheral Bus ToolBus
Data Format
RS-232 Port Settings for No-protocol Communications RS-232C
Send Delay
Number of Received Bytes
RS-232C Port Settings for PLC Link PC Link Slave
Start Code and End Code
PLC Link Unit No. PC Link Unit Number
Send Delay Time
Fixed Service Time Enable Setting Set Time to All Events
Peripheral Service Time
CX-Programmer Module Settings Tab
System Setup in Motion Control Modules
Settings Used by All Motion Control Modules
CX-Programmer Cycle Time Tab
FQM1-MMP21 Motion Control Modules with Pulse I/O
CX-Programmer Pulse Input Tab
CX-Programmer Pulse Output Tab
Function Details
Address Bits Function Remarks When setting
FQM1-MMA21 Motion Control Modules with Analog I/O
Peripheral Port Settings
Details on System Setup Settings
Startup Mode
RS-232C Port Settings Host Link Port
Watch Cycle Time
Messages Sent and Received with No-protocol Mode
Constant Cycle Time
Fixed Peripheral Servicing Time
Over
328
FQM1-MMP21 Motion Control Modules with Pulse I/O
Auxiliary Area Allocations by Function
Allocations That Are the Same for All Modules
330
331
332
333
334
335
FQM1-MMA21 Motion Control Modules with Analog I/O
337
338
339
340
341
342
Allocations Related to Built-in Inputs
Appendix C
Error Log and Error Code
Program Error Flags
Other Error Flags and Bits
System Flags
Errors
FAL/FALS Errors
Memory Errors
Module Errors
Peripheral Port
Communications
Other
RS-422A Port
Allocations Directly Related to Instructions
RS-232C Port
Coordinator Module Built-in I/O Allocations
Motion Control Module Built-in I/O Allocations
Appendix D
Appendix D
351
352
353
354
355
356
357
358
Classification Error code Meaning Error flags
Error Codes and Error Flags
Error Log Area A100 to A199
Detailed Explanations on the Auxiliary Area
Memory Configuration
FQM1 Memory Addresses
Memory Map
Sequence Output Instructions
FQM1 Instruction Execution Times and Number of Steps
Sequence Input Instructions
Comparison Instructions
Timer and Counter Instructions
Sequence Control Instructions
Data Movement Instructions
Data Shift Instructions
Increment/Decrement Instructions
Symbol Math Instructions
Conversion Instructions
Logic Instructions
Special Math Instructions
Floating-point Math Instructions
Subroutine Instructions
Table Data Processing Instructions
Data Control Instructions
Interrupt Control Instructions
High-speed Counter and Pulse Output Instructions
Step Instructions
Refresh Instruction
Failure Diagnosis Instructions
Serial Communications Instructions
Debugging Instructions
Other Instructions
Iend
If not
Else
374
Index
Index
377
378
379
Page
381
382
383
384
385
386
Original production
Revision code Date Revised content
Revision History
388
Omron Corporation
Regional Headquarters
Terms and Conditions of Sale
Omron Electronics LLC